Hi everyone,
I want to find out, which throttle translates into which thrust of my particular drone. Therefore I’ve built a test setup with a computer readable scale, which measures up to 5 kg. I’ve tied my drone onto a ballast weight (a water crate in my case) and put both onto the scale. Now I’ve connected the drone with MissionPlanner and performed a motor test on all motors, specifying the throttle in percent. The weight measured during the motors running is now the total weight at 0 throttle (copter + ballast + battery = 4750 g in my case) minus the thrust.
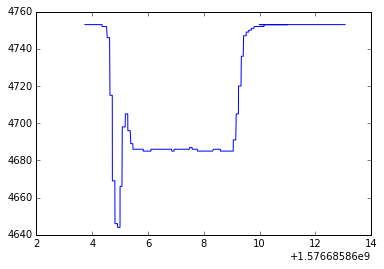
See the two graphs of weight (in gram equivalents) over time (in seconds since epoque 1970-01-01) for what I mean. The weight seems to overshoot quickly to a very short minimum at t=t0+4.9 s with m_measured=4644 g, and then reach a stable point at t>t0+1.4 s with m_measured=4684 g (t0=1.576685864E9 s). The following graph is for a 15 % throttle test run.
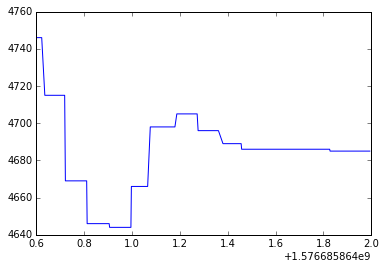
For more detail I zoomed in the overshoot in the following graph
Shouldn’t this be a nice stepresponse without this peek/overshoot? (as in Fig. 8 in [Yoon 2015])
I checked ArduCopter’s motor_test.cpp and the test performed seems to just give the ESCs the order to set a particular throttle value, given in PWM. Am I missing something here?
Could the overshoot come from the scale?
Yours,
Peter
Resources:
[Yoon 2015]
Yoon, Myunggon. “Experimental identification of thrust dynamics for a multirotor helicopter.” International Journal of Engineering Research and Technology 4.11 (2015): 206-209.