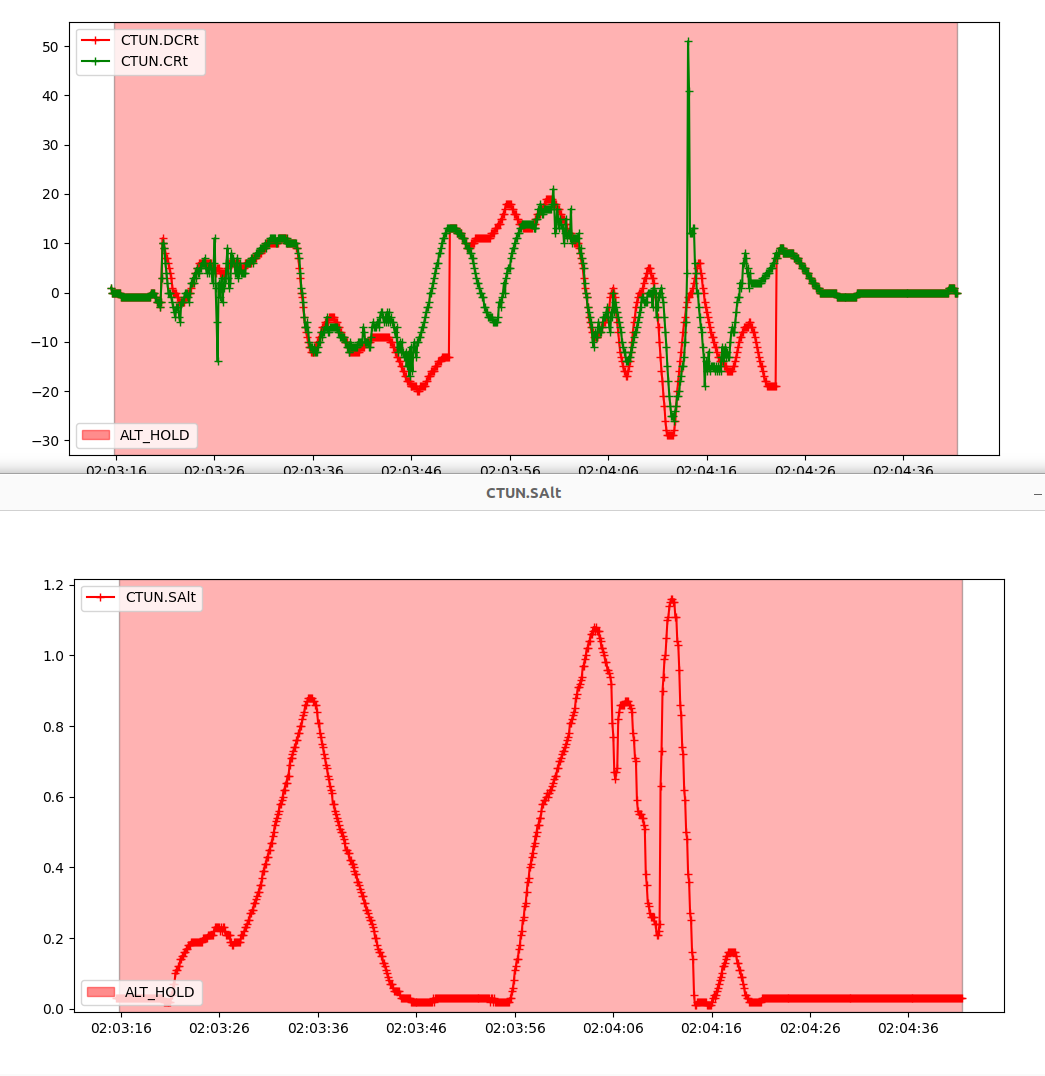
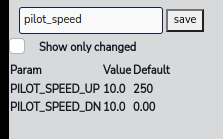
I am flying indoors and I want to limit my drone velocity in the altitude loop (I know I need to limit accel as well). I have reduced the MAX_PILOT_SPEED_UP & DN to 10cm/s but the commands I get are still higher than that.
Do I need to enable anything else? Do I understand this feature the wrong way? Is it not supposed to limit the maximum command input to the climb rate loop?