Appreciate for reading my lengthy posts.
more than 100% sure I did not mix ROS 1 and 2 into one OS, I am on ROS2 humble all along. ROS development team did not put ROS 1 applications into consideration, migration effort is huge. I have update the posts to make it less confusing.
I got it from here without the ros-dev-tools.
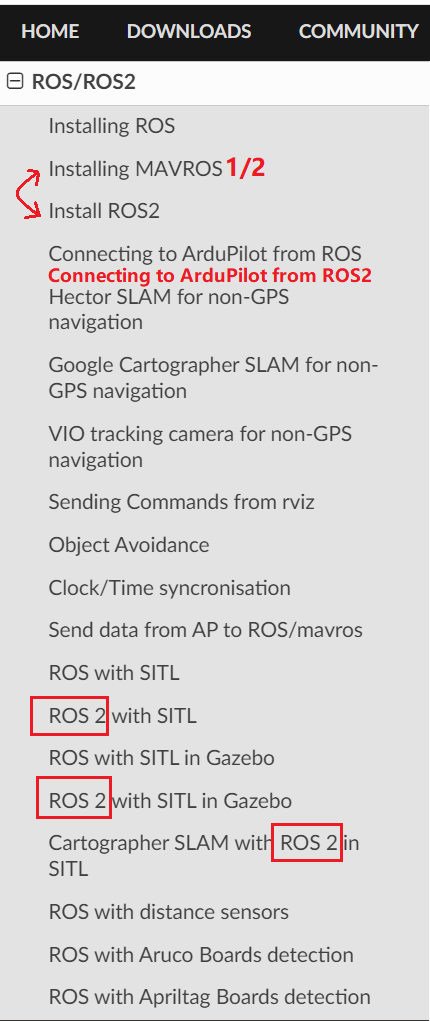
So here is where I can come in and suggest, maybe contribute especially to developer new in this space or with Ardupilot flight stack. since there is huge differences between ROS 1 & 2, I would suggest the following changes to Ardupilot ROS documentation. The arrangement as well. There are specific sub-category for SITL, Gazebo, then it should have for connecting to ArduPilot as well. And I can tell you have to put up a few pointers to explain it.
Ya, for people who just wanted to explore creating new dish would not like to go into setting up a new kitchen in the process. It would be probably for companies in business. Now, minimally I can connect successfully with the real hardware and Arducopter flight stack.
Thank you for the pointers, I think I know which one is missing. Will update here if I can confirm that.