OK, have been playing with Maverick on a RasPi 3 and Maverick is in DEV mode, and like what I see. The question I have is , Is there a mode or settings that need to be changed to use this on a RasPi Zero W in the air? I have it already running on the Zero, but it is running “DEV” and is a little sluggish…
Well the pi zero is a little sluggish It’s a slow, single core ARM cpu with slow memory access and everything runs off a USB bus from the last century. Given it’s size and price, it’s a miracle we can run what we can on it
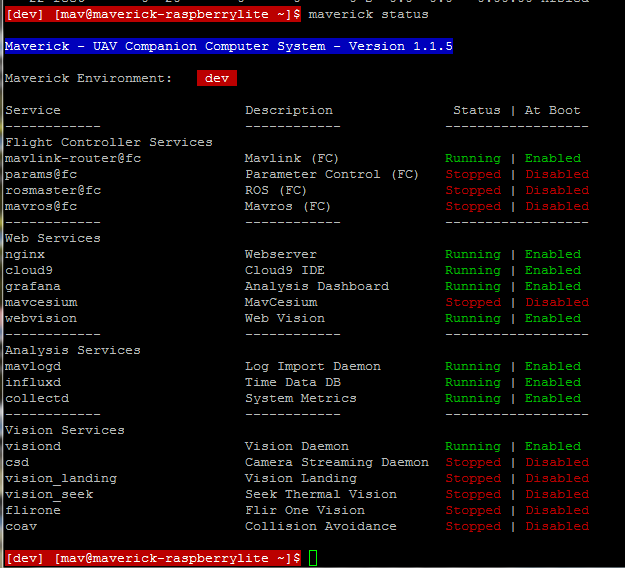
First thing to do is maverick status and see if there are any services running that you don’t need when you’re flying. Normally you would change into flight mode (maverick configure --env=flight), but if you’re using the raspberry-lite image/profile then it shouldn’t be running any of the dev/sitl services anyway.
Secondly, do ‘top’ and sort by cpu usage (‘P’), and see if there is anything hitting the cpu.
Load averages of 1-2 on a single core with the power of an asthmatic ant isn’t too bad. Higher loads after boot is normal - it’s going through lots of system manifests and service start ups in the background.
Yes the flight environment is meant for when you’re flying. On the raspberrylite profile you’re using it won’t make much if any difference, but can’t hurt to set it.
 It’s a slow, single core ARM cpu with slow memory access and everything runs off a USB bus from the last century. Given it’s size and price, it’s a miracle we can run what we can on it
It’s a slow, single core ARM cpu with slow memory access and everything runs off a USB bus from the last century. Given it’s size and price, it’s a miracle we can run what we can on it