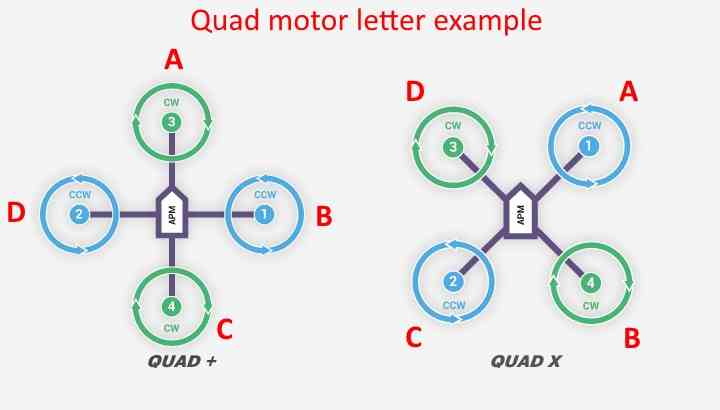
Is there some sketch of various layouts?
FRAME_TYPE: Frame Type (+, X, V, etc)
Controls motor mixing for multicopters. Not used for Tri or Traditional Helicopters.
Value Meaning
0 Plus
1 X
2 V
3 H
4 V-Tail
5 A-Tail
10 Y6B
11 Y6F
12 BetaFlightX
13 DJIX
14 ClockwiseX
15 I
18 BetaFlightXReversed!
H Dave,I will anyway run that test, but could someone answer my question Please?
This should work from ver 4.0
You have been into this before with Jim Thecrumb…
The Frame Type (not Class) set the motor mixer. The ServoX Functions don’t change just the motor position you connect the channels to does. Check this for yourself in the Simulator.
Obviously the board has to be oriented the correct way with respect to the Orientation parameter. Mount the board anyway you like and then determine this.
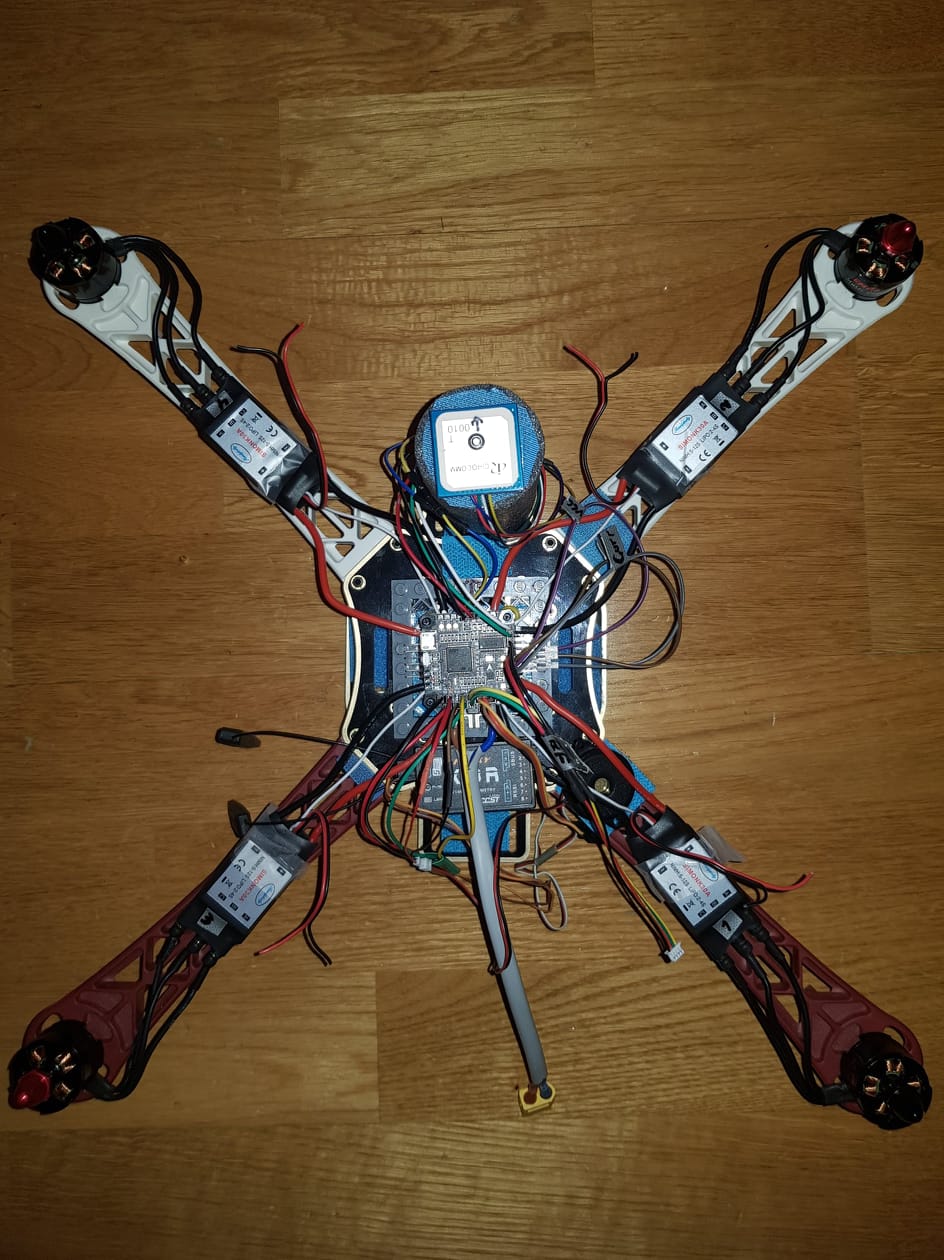
I just went through this again after my quad had a little in air ‘mishap’ which required me to rebuild it
First flight ran into same issue with flipping. This time I ended up going between the motor test and the servo setup - and kept adjusting motors to servos and then checking the spin and order with the motor test.
What makes this difficult is one uses letters A,B,C and one uses numbers 1,2,3 so it takes a bit of juggling to get the right combo. But I flew it this weekend and everything is working again
Tnx, I have not done motor test, not mounted motors yet either. I am confused, when thinking about how to do the servofunction adjustments. Tnx again Gents for your support.
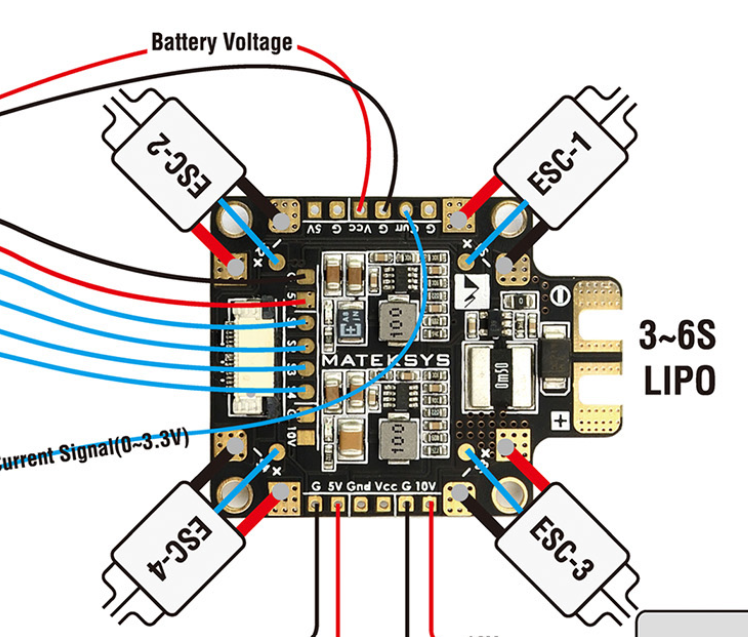
I could not start Motor Test, not with 5,10 or 15%Throttle. It did not change when selecting Frame_Type =12 and yes I re-booted. All motors spin if I arm from Radio. Do I need to connect ground from ESC’s somewhere?
The Motor Test is now running without the ground connected Had to calibrate ESCs an increase to 10%. Anyway main problem is what sequence to look for and shal I use Frame_Type 12 or 1 ?
The sequence in Motor test doesn’t change.
A-Front Right
B-Rear Right (or next motor clockwise around the frame)
and so on clockwise around the craft.
This is the advantage of how the Motor Test is run. People complain about it because they don’t understand the logic behind having the same order no matter what.
Use whatever Type you want. Why not use X which is default?
Tnx Dave, I will test combinations 33,34,35,36 for servo1-4functions and goal is to get motor layout like for Pixhawk without soldering.
I use FrameType 12 now, but may go back to 1.
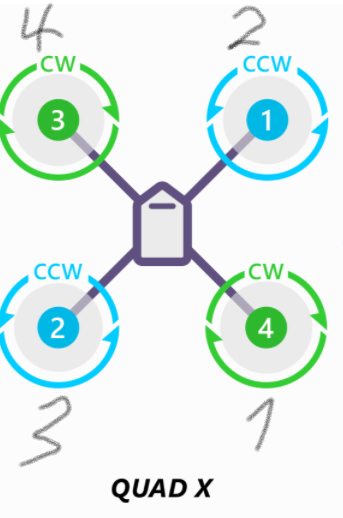
After some tests this worked for my X layout, tnx !
Testpattern A,B,C,D clockwise from A=Front Right, B=Rear Right, C=Rear Left and D=Front Left I used: Servo1_Function=36, Servo2_Function=33, Servo3_Function=34, Servo4_Function=35


{kind=link}