Hi,
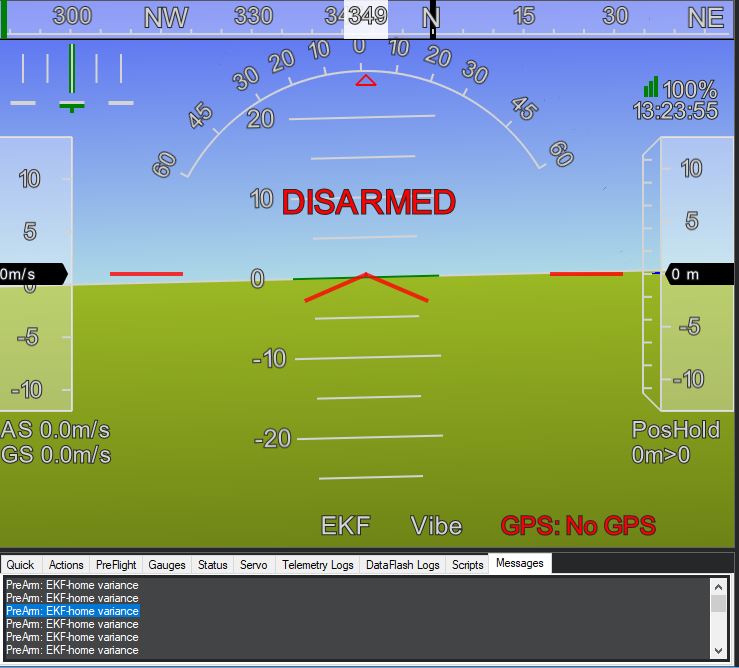
I was integrating I was integrating ardupilot with marvelmind following the steps in the ardupilot manual. At times the system is able to successfully connect and correctly lock to 3D coordinates. However, majority of time the system fails arm due to EKF_HOME_VARIANCE and/or enters a state where the ground speed increases drastically despite the drone not being moved at all. Has anyone experienced this issue? What is the condition that creates EKF_HOME_VARIANCE? I have attached photos of the event as well as the parameter file (with place place holder for the real BCN_LAT and LONG).
-Thank You

PARAM.param (17.3 KB)