TRex 550 with Matek H743WING board running Ardupilot heli 4.3.0.
I’ve flown the heli for many years with a different controller, and this was my first test flight with the Matek board and Arudupilot, expecting only to get a log file in Stabilised mode so I could check the vibration levels before checking POS HOLD and RTL and putting it back into its scale fuselage.
Preflight checks were good (control directions and FC corrections) and the controls felt right while spooling up and when light on its skids. Lift-off occurred where I expected it, at just above 50% collective stick, but after a few seconds the copter started shaking so violently that I landed and disarmed. After the rotor had stopped turning I re-armed and tried again, with the same result.
I can see from the log that Y-axis vibration is unacceptable, but that’s the limit of my analysis capabilities. Is that enough to cause the side-to side shaking I was getting (NOT tail-wag), or can anyone see anything else untoward in the log please?
Sorry, I was confused about that, for I couldn’t find a .bin file for what I thought was the correct date and time. The .tlog was one of about half-a-dozen files with the same date and time stamp, so I thought that MP had changed the .bin file’s suffix when I viewed it. This .bin file is about two minutes earlier.
I’m working on reducing the vibes, but I’m beginning to wonder if some of the parameters are incorrect. I’ve compared the param file with one from my TRex500 heli that’s flying well, and I see five obvious differences other than minor differences caused by different models:
ATC_RAT_PIT_FLTD is 23 for this heli but 0 for my TRex500
ATC_RAT_PIT_FLTE is 0 for this heli but 20 for my TRex500
ATC_RAT_RLL_FLTD is 23 for this heli but 0 for my TRex500
ATC_RAT_RLL_FLTE is 0 for this heli but 20 for my TRex 500
ATC_RAT_YAW_FLTE is 2 for this heli but 20 for my TRex 500
Attached is the current param file for the TRex 550. Could the values I’ve listed above be the cause of the shaking, or any other params?
Allan,
The vibration is pretty high frequency. I can’t tell for sure because the logging isnt fast enough. I would guess that it is around 25 hz (1500 RPM). It could be 3000RPM. What is the rotor speed set at?
Please turn on FAST_ATTITUDE in the logging bitmask parameter (LOG_BITMASK). It is interesting that the vibration builds instead of being consistent from start up. Since it isn’t constant, then I don’ think it is a rotor balance issue but not sure. If you feel comfortable doing another short flight to capture data with the FAST_ATTITUDE logging that would help with the troubleshooting.
Thanks Bill, I’m happy to do another test hover (only a couple of seconds, due to the shaking!) with FAST_ATTITUDE enabled.whenever weather permits, which won’t be for a couple of days from the look of things. Do I need to disable ATTITUDE_MED when doing this?
But what about the ATC_xxx parameter anomolies I noted? And browsing through the MP Config>Standard Parameters menu I see that ATC_RAT_YAW_FLTD, PSC_ACCZ_FLTD and PSC_ACCZ_FLTT,are all 0 and are highlighted in yellow. They seem to be 0 too for my TRex 500 which is flying well, so what does the yellow highlight signify?
I note that the wiki suggests that high vibe numbers in Y-axis only are usually cause by FC mounting failure. I’ve used 5mm Kyosho gel and now 3mm 3M foam tape, but Y vibe is always around 25 with X and Z down near 10. But 25 for the Y-axis is acceptable, though maybe borderline, so could vibration be the cause of my shaking?
P.S. My head speed is 1900rpm, governed by my CC Talon ESC.
Here’s the .bin file from today’s test flight, with FAST_ATTITUDE enabled. I hope it reveals something to you. Apart from that change the param file is still the one I posted 4 days ago.
The log shows two attempts at flight. On each occasion you will see stick movements after arming, during spool-up, as I get a ‘feel’ for the heli. Then the heli lifts off and immediately starts such a rapid shaking in the roll direction that I have to put it down for fear of it self-destructing. To my inexperienced eyes it’s as if two parameters within the FC are fighting with each other. https://drive.google.com/file/d/1wFBi8emL0bqjRAhGXjQAvfx5app_lC36/view?usp=sharing
Thanks Ferrosan. I’m flying with whatever parameters MP has set up for me during the configuration process, so presumably the “default” settings.
I’m not conversant enough with PIDs to start tweaking them, but I’ve already noted that my ATC_RAT_RLL_FLTD and ATC_RAT_RLL_FLTE are the opposite to what they are on my two TRex 500s which are flying successfully; _FLTD is 23 for my 550 and 0 for my 500s, and _FLTE is 0 for my 550 and 20 for my 500s Could that be the issue? Is it safe for me to change them to the values used by my 500s?
Also ATC_RAT_PIT_ FLTx and ATC_RAT_YAW_FLTx are opposite to my 500s, but pitch and yaw don’t seem to be an issue.
Sorry, I haven’t had a chance to look at the latest log but the oscillation frequency seemed pretty high. If you want to check to see if it is the PID controller causing the issue then just set ATC_RAT_RLL_P and ATC_RAT_RLL_D to zero and conduct a test flight. If it still shakes then it isn’t the PID settings. I will try to look at your log tonight
Yeah, be careful doing that. You might have noticed that roll and pitch have the same gain values in your current FC setup. This does not fit helicopters where pitch and roll generally have very different mass moment of inertia (unlike quadcopters, where generally mass distribution is equal in longitudinal and transversal directions). Hence the gains for helicopters can be very different on pitch and roll. Following what you are reporting, I agree with @Bill so put P & D terms to zero on roll-axis for a start. Also put D-term on pitch axis to zero. This configuration will almost certainly make disappear the violent shaking you are observing and will make a good starting point for the following tuning/vibrations debugging of your helicopter.
@abenn1 based on your most recent log, it does appear to be an instability due to a high PID gain. So I would say set the PID gains as I instructed above. Once you verified that the instability is gone then tune the gains in the roll axis. Based on the frequency of the instability (approx 12 hz), I think this is due to the ATC_RAT_RLL_D gain being too high.
I have not yet paid attention to which default values the FC sets for a virgin state. I always first set the values that are suggested in the Tuning Wiki as default values. With these values, so far no helicopter crashed during the maiden flight (hovering). Then I do the manual tuning according to the wiki. Or the Autotuning after the Wiki of Bill.
I set ATC_RAT_RLL_D and _P to 0 as suggested, but as soon as the heli got light on its skids the tail shot off to the left (right yaw) and shredded the tail blades, so I shut down. Previously they were 0.001 and 0.024 respectively. Attached is a link to the log file of that flight. Also attached is the param file for the flight.
I note that ATC_RAT_PIT_FF and _RLL_FF are set at 0.15 as suggested for starting values in the tuning wiki, but _YAW_FF is 0.024. I haven’t knowingly changed these values while setting up this heli, and tail behaviour wasn’t a problem on previous tests. ATC_RAT_YAW_FF is also 0.024 for my two 500 helis, so I guess it’s the default
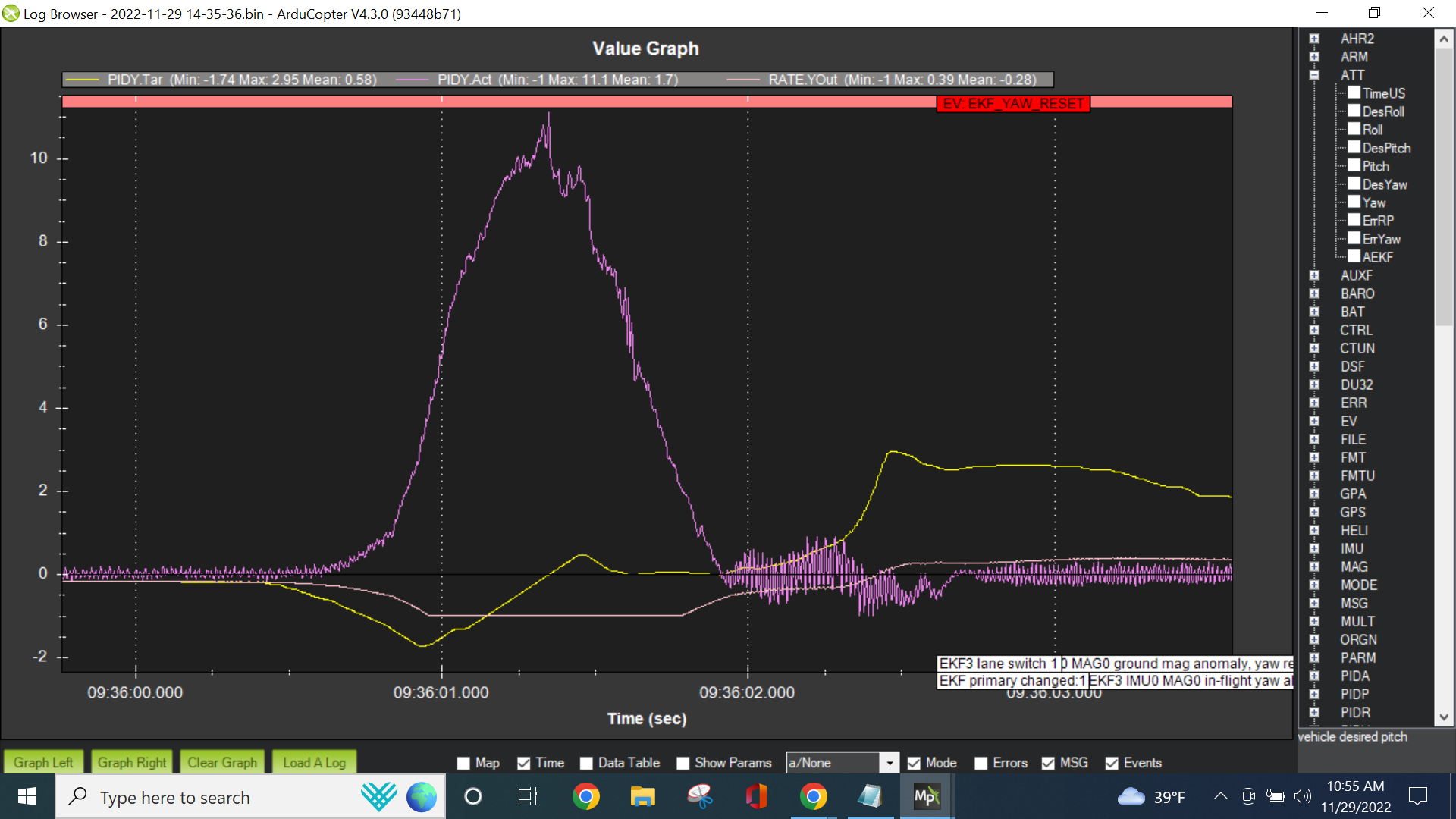
@abenn1 I am sorry that your heli got damaged. changing those parameters would not affect the yaw axis in this way. Looking at the data, the controller in the yaw axis responded correctly (giving full left yaw input) but the control input must not of had any affect on the aircraft response.
I am puzzled as to why this happened. This is acting as though the tail rotor failed but if that was the case then the aircraft would spin in the opposite direction (nose left) for a rotor that spins clockwise (viewed from above).
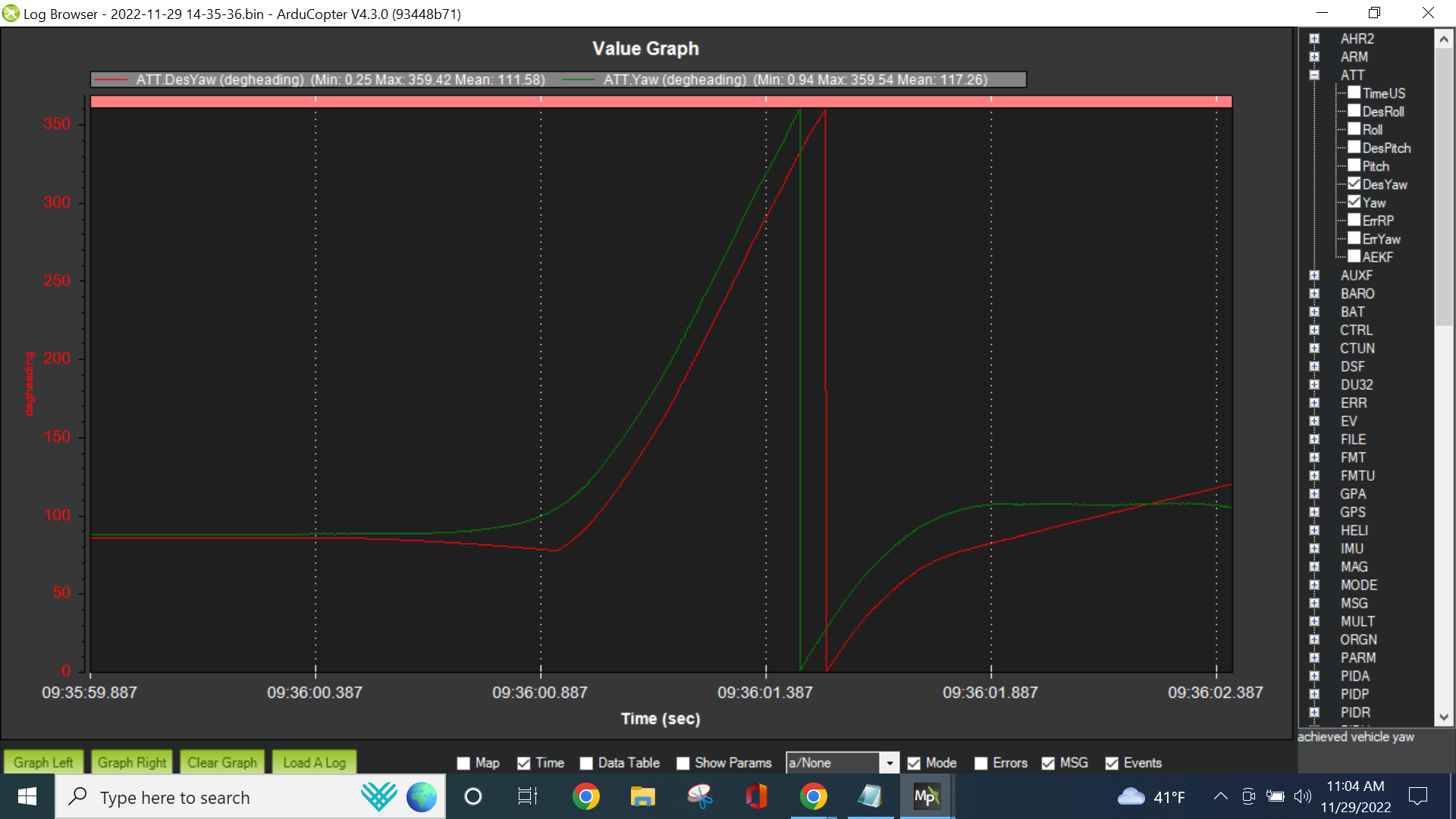
In this graph, you can see that the desired heading is trailing the actual heading. This indicates that some disturbance is causing the tail to move uncommanded to the right. It drags the desired heading with it at some angle difference. This is done to keep the actual and desired heading from getting too far apart to keep from affecting the pitch and roll inputs.
Again the changes that I had you make should not have caused this. Was it windy when you flew? Did you make any physical changes to the heli? What was the tail servo position after shutdown? was it stuck in the full right position? (indicating possible servo failure). Check the tail servo to ensure it is behaving normally
No need to be sorry Bill, I expect glitches when messing with helis. And building (repairing) is just as much my hobby as flying!
There was no wind during this test, and the only change since my last shaking flight was to replace the tail rotor holder (like for like) in case that was contributing to Y-axis vibration. I admit in the heat of the moment I don’t remember what position the tail rotor was in when I shut down. I’ve already rebuilt the heli (a couple of teeth missing of the TT front drive gear) and given it a brief run with no tail or main blades on, and all seems well, with vibration levels no different from before.
So the parameters look okay to you? If so, I’ll give it another go tomorrow.
Thanks Bill. I did set it at 0 but MP reported that it was out of range. It gave me the option to proceed anyway, which I did. I’ll change it again tomorrow and see if it retains the 0 value.
As for the uncontrolled yaw, the fact that I changed the tail blade holders should have rung alarm bells: I’ve just checked, and I found that I’ve connected them to the opposite control linkages than they were before, resulting in reversed operation First time I’ve done that in 30+ years of model flying, so I’ll correct it tomorrow and re-check the tail servo operation before doing another test flight.