Thanks for the reply. I have already connected to the Terminal (v1.3.1) and everything works perfectly in there, but I can not find the settings per the instructions listed on LiteWares Github. The link you supplied does not even contain the current version of the Terminal software? Are there two different programs for setup vs. firmware update?
Thanks for the help, I’ve got it more or less figured out.
After rechecking all the parameters, upgrading to v1.5 FW and trying multiple serial ports on the FC
I upgraded to plane 3.9.2 ( I was on currently using 3.8.5 ) and it just works…
edit: I should add for clarity that the 3.8.5 we were running was slightly modified to communicate with our ECU. I will upload an untouched 3.8.5 and see if the LightWare sensor continues to work.
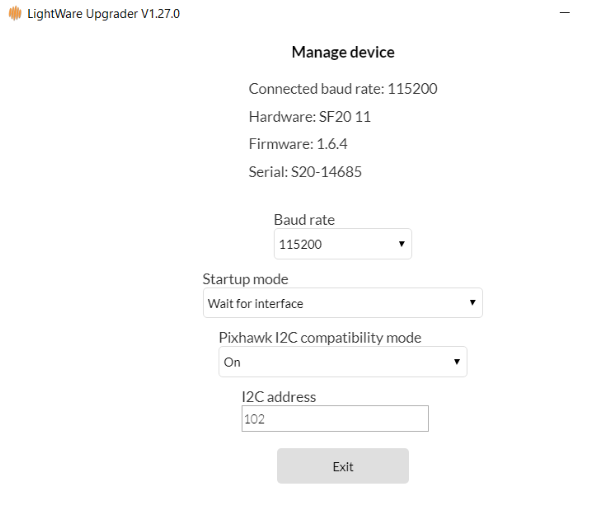
No, the upgrader will detect the devantech device and it just worked out of the box for me. Check your wiring and also the voltage selection jumper. It should be on the right-hand set of pins, if you are looking at it with the USB port facing up.
That said, I actually have a couple lidars that won’t communicate at all, so maybe you’re in the same boat. I don’t see a way to specify the I2C address when connecting with the upgrader or LW terminal, so maybe they’re set to a different address.
A little update. I had Lightware collaborate with me to solve my issues with lidar.
Last one they sent to me was updated with latest firmware and the authomatic selection of serial and i2c worked. I connected it and it shows values and works (i am using it on i2c).
I still have a problem i am working with them. My SF20/C (a decased version of te LW20/C) is unable to read above 60-70 meters, sometimes a bit more, sometimes a bit less. I sent lightware my latest log for them to review.
They are still reviewing the log but they told me that maybe the surface i am flying over is not reflective enough, it is strange because my other machine equipped with a SF11/C works perfectly up to 100+ meters and never gives a bad readings, flying over the same exact path.
Maybe the new small 20 series has a slightly lower performance/power laser and that is where the problems come from, i’ll wait and see what their diagnosys of the problem is and how/if we can solve it.
Got a final answer from Lightware, in the end they say it is normal that the SF20/C works up to 60-70m meters. It depends on surfaces i fly over, they say. Actually i fly over the usual grass, tarmac, cement.
They say 100 meters on the SF20/C is only reachable with a white surface (doesn’t say it on the site where they sell it).
So bottom line is, if you get an SF20/C or LW20/C expect it to be trustable up to no more than 60 meters. If you need something good up to 100+ meters regardless if you fly over a white wall or grass than get an SF11/C. It is a big bigger but it has almost twice the performances of the 20 series.
All in all i am not impressed by their answer and the not so truthful spec of 100 meters on the 20 series.
hi all. I need a rangefinder which is cabable of 50-60m REAL range outdoor. People which have opportunity to test the SF20, can confirm it works up to that? Thank you Corrado for your contributions, so far, although it doesn’t read up to 100m, if it does 50-60m it’s ok for me.
Range of a lidar sensor depends heavily on the environment and weather.
60-70 meters is only realistic in clear and dry weather conditions.
Slight mist, dust, haze will result in false readings at eventually even less than 15 meters.
It has come to our attention that ArduCopter V3.6.6. is not working with LightWare devices. I have tested V3.6.7-rc1 and everything is working fine again, so the problem has been resolved.
I am not sure yet at which version the problems started happening.
Just as a note for anyone looking at this in future. It appears that only serial communication is broken in ArduCopter 3.6.6, the I2C still works there.
Rob. I am using the LW20 successfully with copter 3.6.6 on NutX, however I added a time delay relay between the lidar and the pixhawk that allowed the lidar to be powered on roughly 5 seconds after the pixhawk is powered. The lidar is powered separately from a 5V BEC.