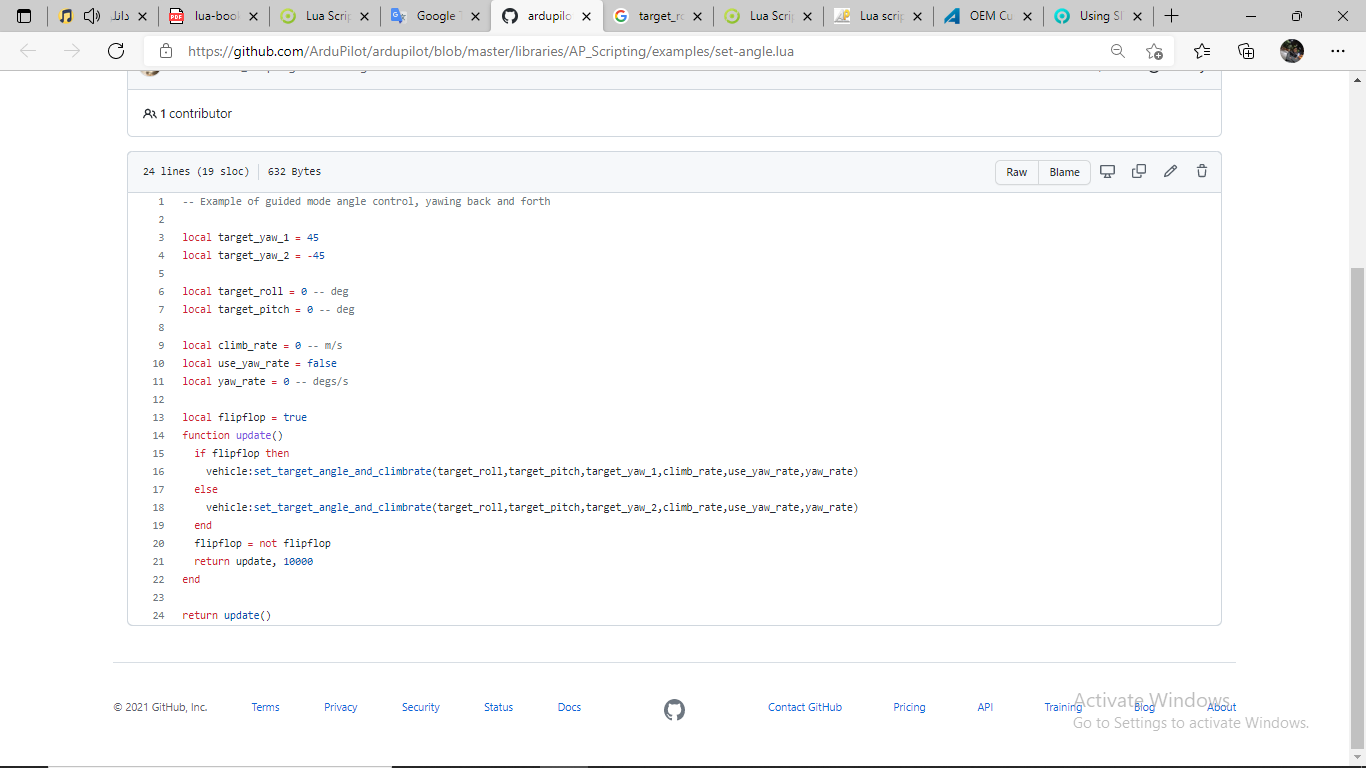
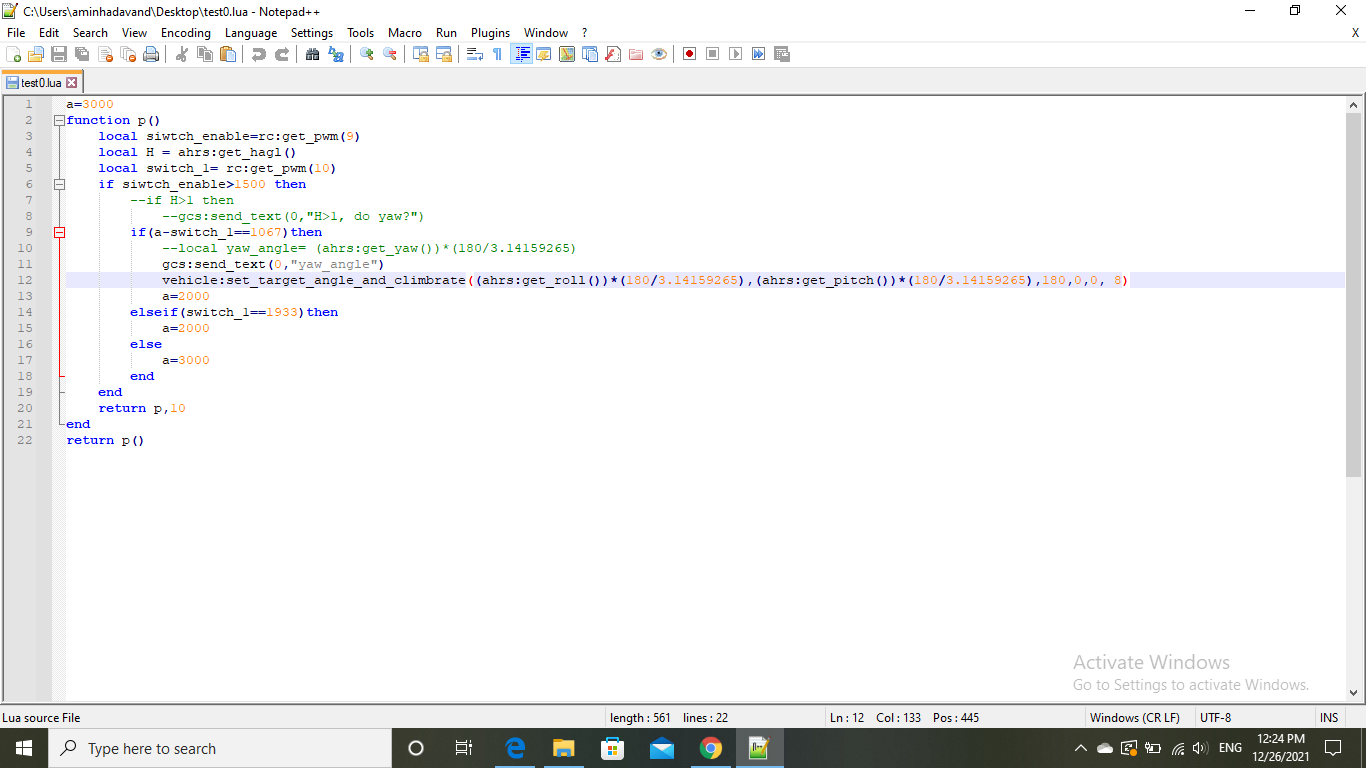
I Created the “scripts” folder in the APM folder and added Lua scripts one at a time (hello world etc) and tried multiple in the folder. I also enabled scripting. I always get the “no scripts to run” message.
Another piece of information just in case it matters, I had flashed my Taranis QX7S with a new firmware version and it no longer turns on. So I do not have any transmitter receiver link at the moment. I am just running the Pixhawk Mini with the USB cable.
My immense complements to the ardupilot groups…as a retired software engineer, this is cool stuff. I am very new to ardupilot and drones but very interested. I am working on a drone project with one of my sons. Thank you!
I am not sure how to use Lua Scripts there, but I guess it is possible and more complete than a board without a receiver or radio. You can also connect the mission planner in the simulated vehicle.
I connected faster and saw that the hello world did run.
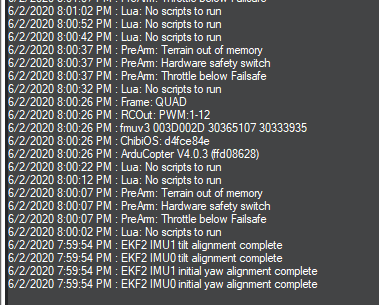
The messages I had seen said “no Lua scripts to run”. I interpreted that as that it could not find any at all to run.
I put in the looped hello world and it runs perfectly. A better message may be “No Lua scripts left to run” or something like that. For us very new Lua people!