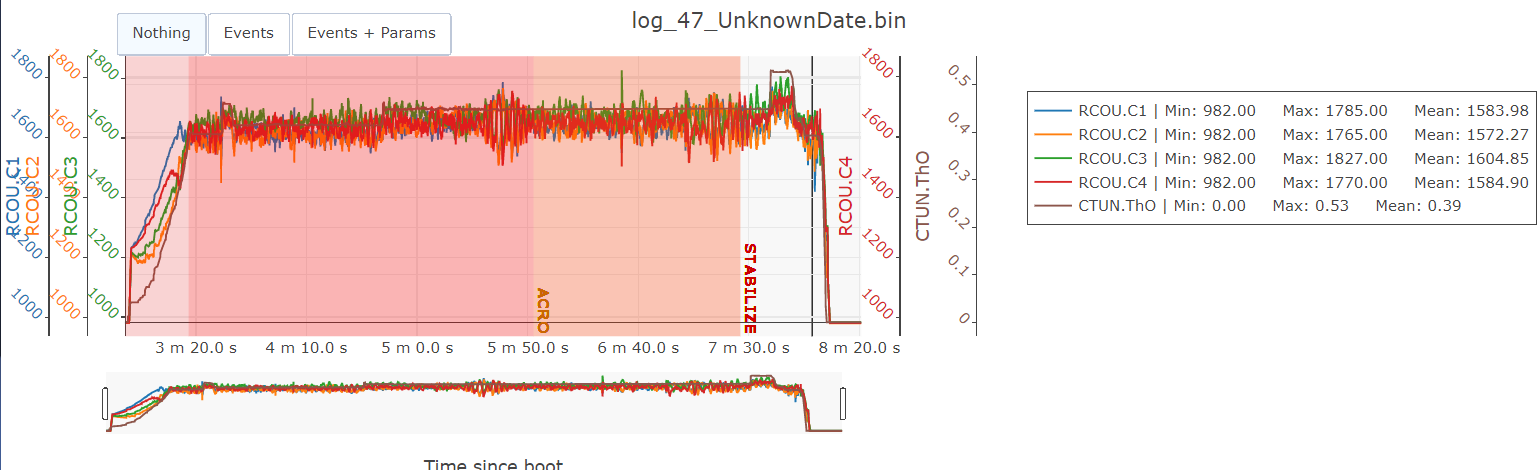
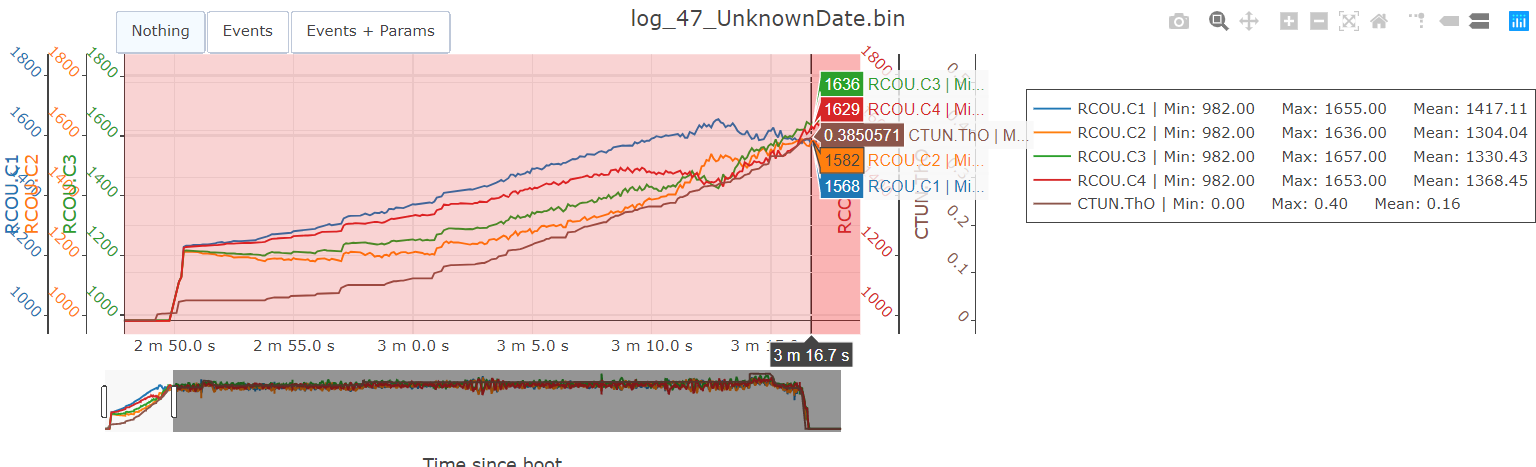
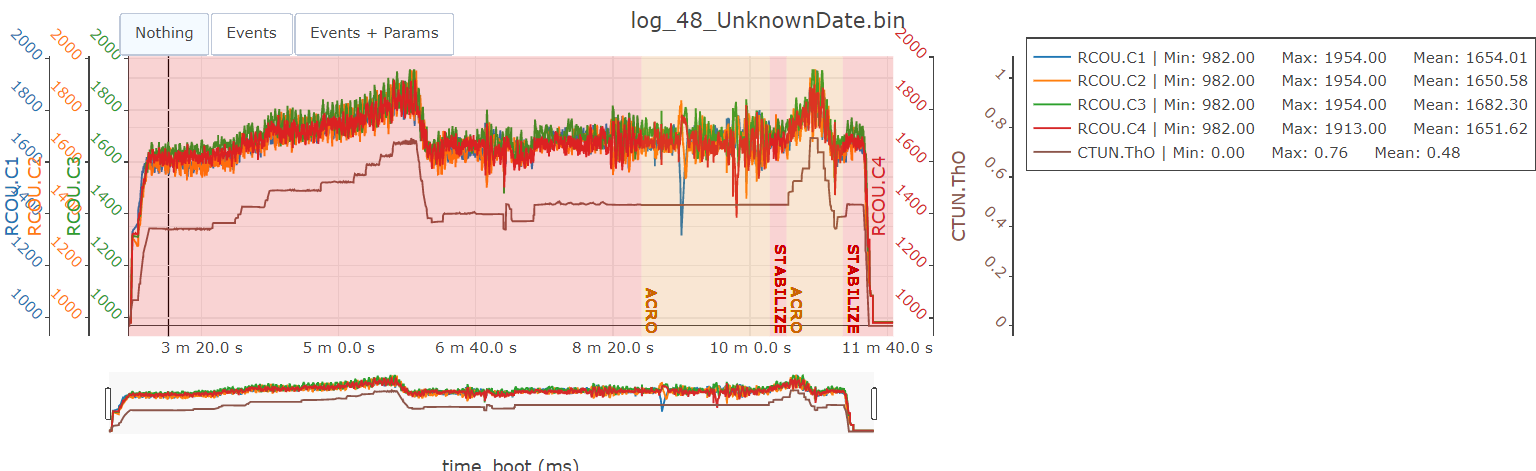
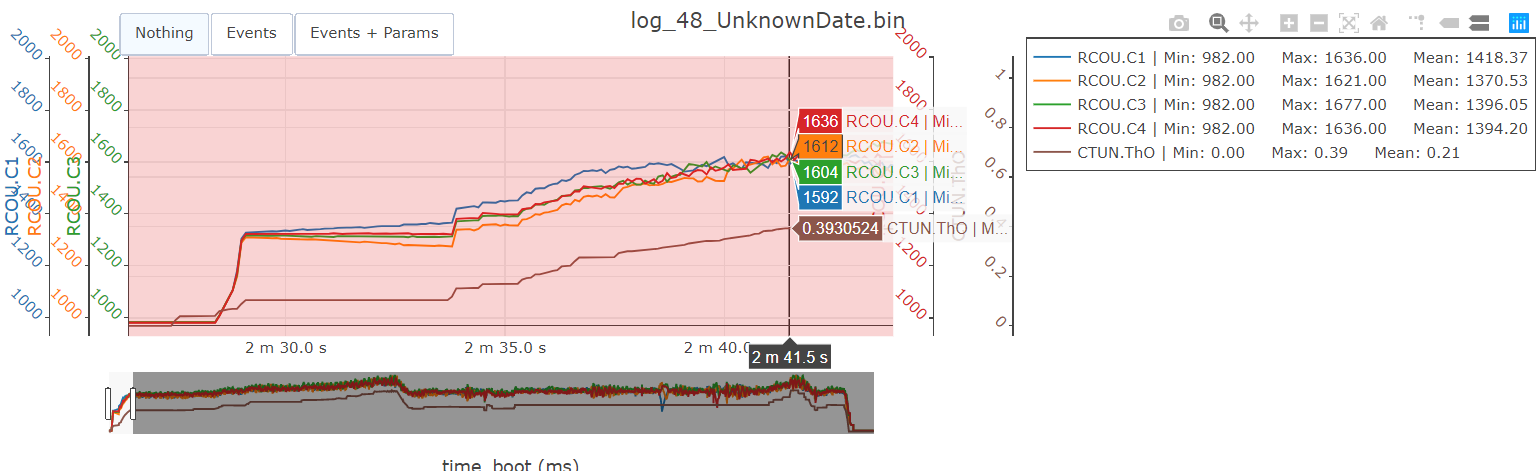
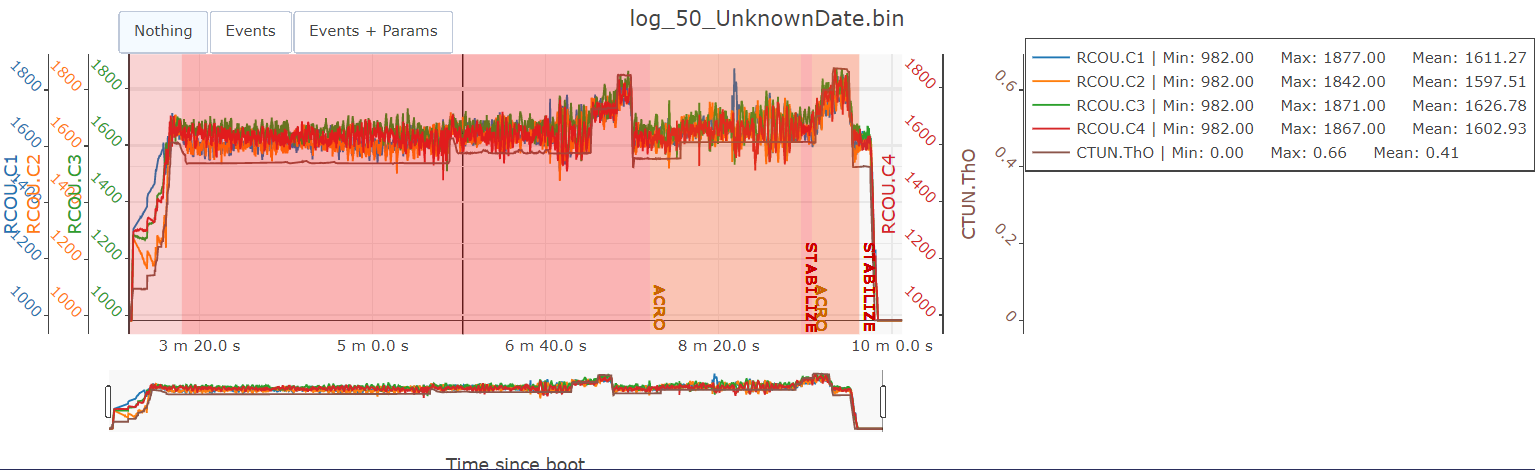
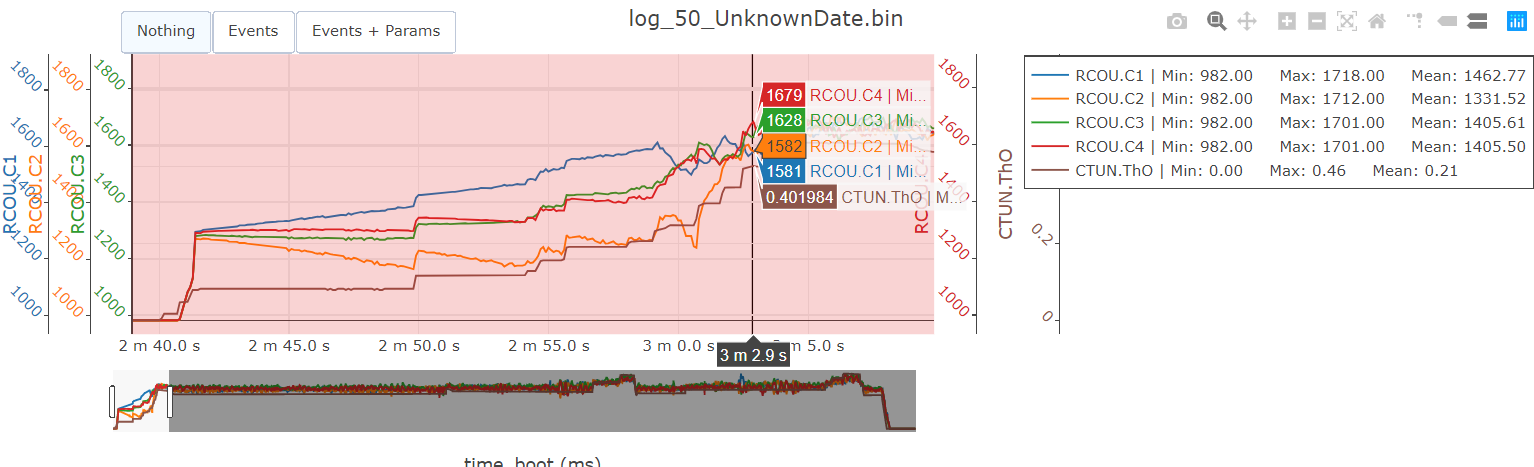
So, when my drone takes off, during the low throttle values building up to the hover throttle, the motors are not even in output, often deviating heavily from each other before suddenly converging toward each other at the hover throttle and becoming relatively even in output. Is there a way to fix this? I’ve attached a few telemetry data graphs to show you what I mean.
Also, looking at those graphs, is the motor noise normal, or is it much too large?
What I see is the Initial Setup parameters have not been configured (most at default) and tuning is very poor. It also looks to be underpowered/overweight.
Lol, fair enough. You can tell I’m new at this then. So:
Where are the Initial Setup parameters in QGC as there is no menu called that, or which parameters are classified as such?
How do I determine if tuning is poor if the drone seems to fly and control fine (maybe I could use AutoTune)?
Other than the difference between the throttle output and the servo output, how would I know if the drone is underweight or overweight? And is the only way to fix that by adding or subtracting weight of the drone, or is there a way to “calibrate” or alter the parameters of the motors/servos to be more in line with the present weight?
Use Mission Planner. QGC does not have the plug-in.
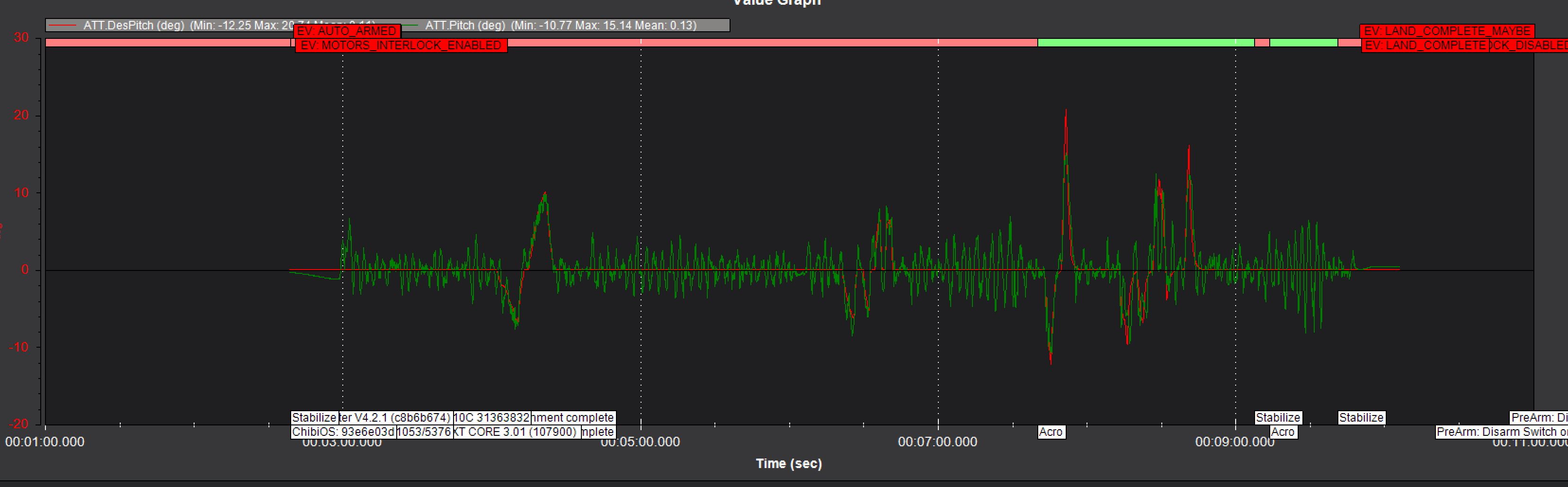
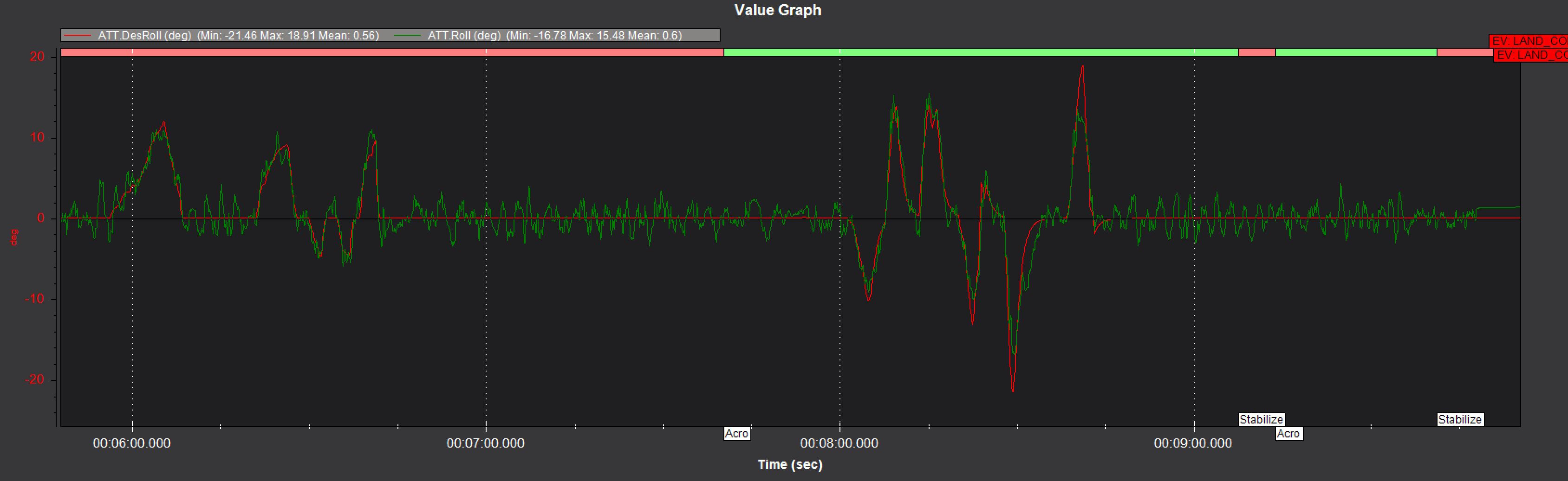
First by reading the Wiki about Tuning. Auto Tune is a good goal but you must do some preliminary tuning and configure the Dynamic Notch filter before attempting it.
Here is one set of logged parameters that indicate tuning. These look terrible. They should mostly overlay.
View the RC outputs in the log. Ideally these should have an average pwm value of ~1500 or less at hover. A bit over can be acceptable but you run the risk of maxing out the outputs and then stability is compromised. If you ever see a “Thrust Loss” error then you will know for sure.