I am flying drone autonomously and controlling drone using GUI(GCS) which sends commands from RPI attached to pixhawk(version 2.4.8) running arducopter(firmware version 3.6.9) quad(+) configuration. I am using Here GNSS(M8N) gps. I am using mavlink commands to control the drone by running pymavlink python library on RPI. In my last flight, my drone misbehaved just after listening to takeoff command. When it took off, it started to move in only one direction. I tried to land the drone when i saw it moving itself in one direction. I send land command to pixhawk from my GUI(GCS) and i ensured on my GUI(GCS) that my pixhawk took the land command but it didn’t land. It kept koving in one direction and stopped listening to any mavlink command given from GUI(GCS). I also noticed as it was going away from me it keep increasing its height.
I recovered the log files of last 2 flights of that drone, everything seems okay with the second last flight but i got many errors in the last flight. The main errors i found was: EKF_CHECK-2 and FAILSAFE_EKF-1 with some other errors too. One important thing is that i always fly my drone with all failsafes being off.
I wasn’t able to make out what was the concrete reason for that drone to go totally out of control and moving in one direction. Thing which troubles me more that i found from the last log that my drone did listen to land command but it didn’t landed, how come in any case my drone will override the land command and other mavlink commands in case of errors.
I am sharing the pictures of that drone’s last 2 flights, also the log when my drone goes out of control.
This is altitude graph of my drone’s second last flight where everything seems okay and according to GUI(GCS) instructions:
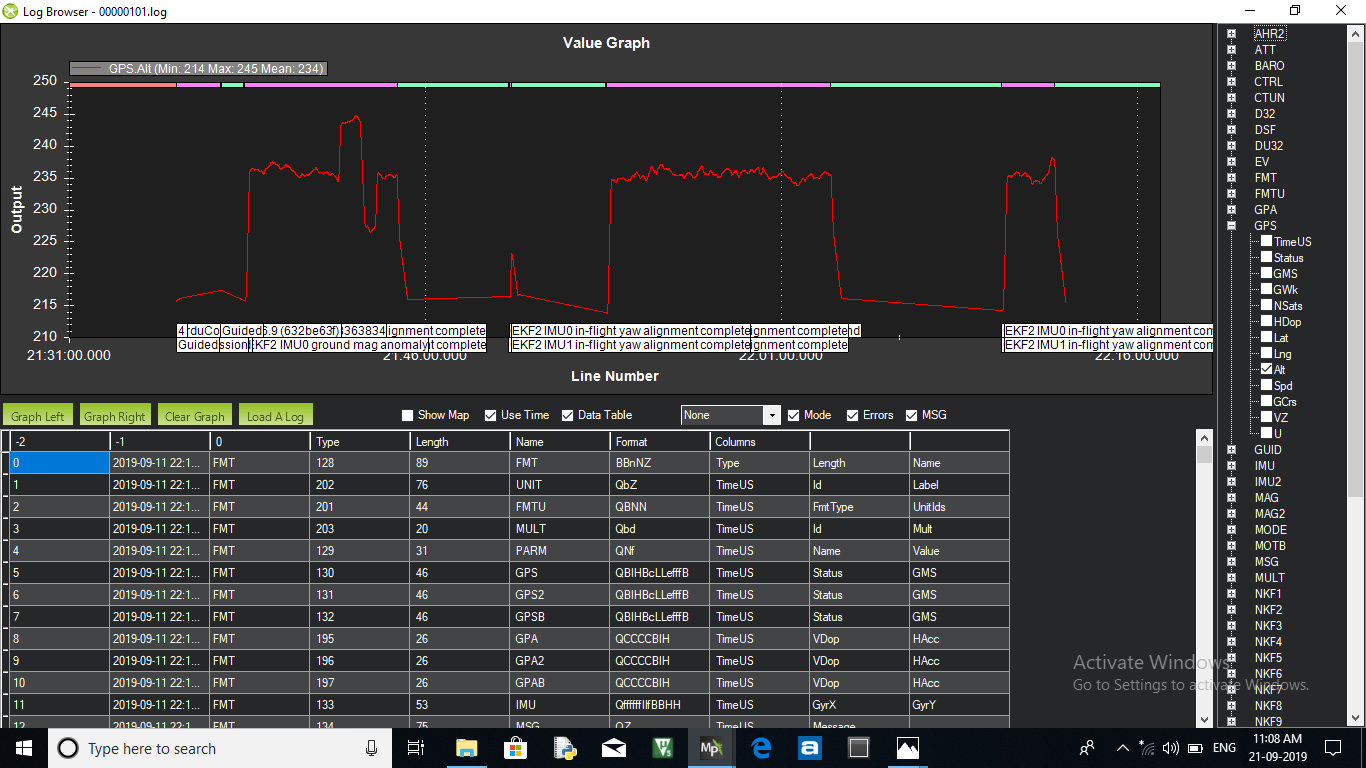
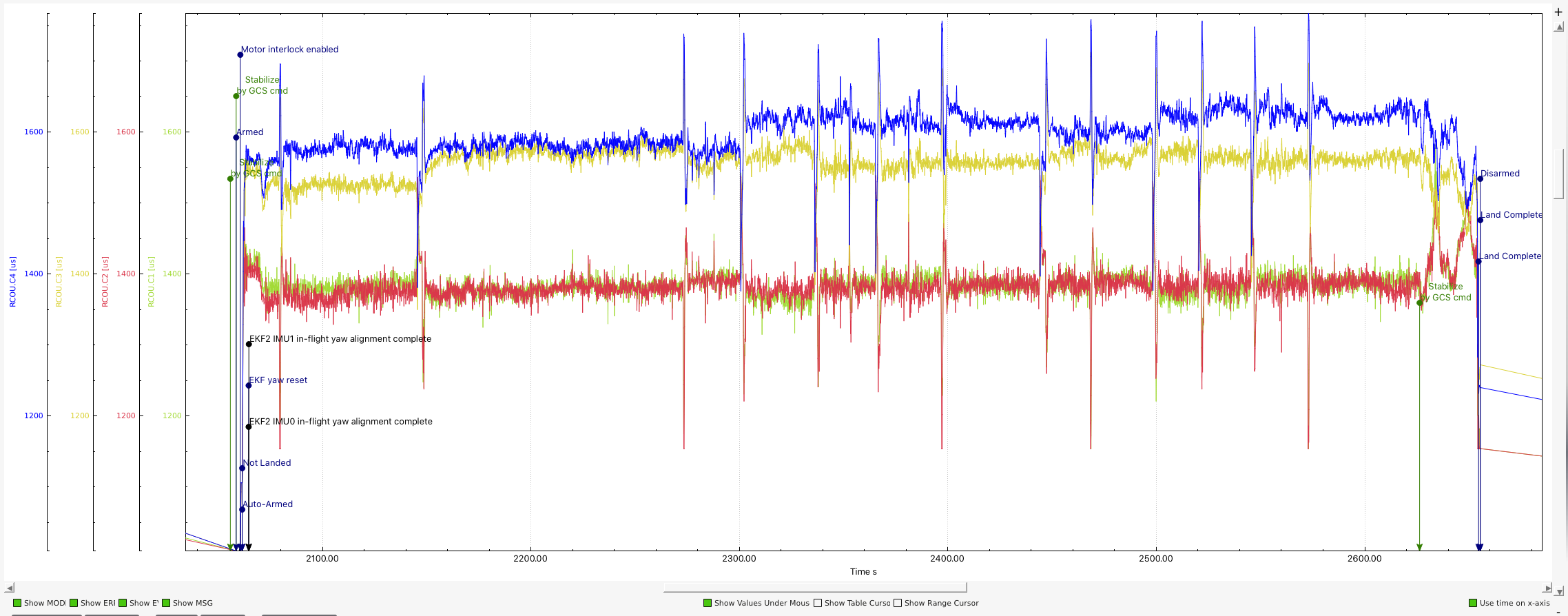
This is also the altitude graph of same drone in the last flight where my drone goes out of control, height here changing itself, you can also see it took land command but didn’t landed and throw many errors too:
Please can someone help me finding the concrete reason why my drone misbehaved like this and stopped listening to all mavlink commands, specially land command when it throw the errors
you need to pay a lot more attention to detail on the mounting of the flight controller, the elimination of magnetic interference from the motors and on power supply.
It’s been said may times that if you turn your failsafes off then you are setting yourself up for a failure.
You also have your arming checks turned off, and that is just asking for trouble.
And last, you are not using an RC transmitter as backup.
An RC transmitter and being able to take manual control is the way out of these situations.
Until you have a good tune, have sorted out your problems, and are sure that you have a solid setup is the only time you should only use a GCS for control.
Even then, I never recommend flying without RC backup.
Thanks for your suggestions, i will follow it up when i will fly one drone at a time, but for now issue is that i am flying 9-10 drones together with 1 operator controlling all drones using GUI(GCS), it happens to be 1 of the 9 drones which misbehaved, i am flying these 9-10 drones time to time from last few months, this misbehavior has never happened before, i know i need to incorporate few failsafes to avoid this happening again, i am going to make certain changes for sure according to the problems pointed out by tridge above, it will be really helpful if i can get more inputs about the reasons for misbehavior of my drone so i make all corrections and ensure the safe flight of my drones, i just want to make sure if my pixhawk and gps was working alright
Thanks for finding these issues, can you please check log of second last flight of same drone, i want to ensure if everything is alright with this drone or am i taking risk every time i fly this drone?
Log of second last flight where everything went according to commands given from GUI(GCS) to drone:
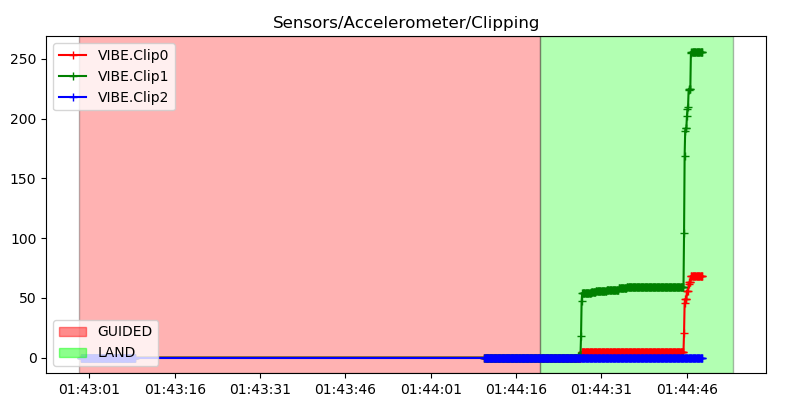
At least there is no clipping
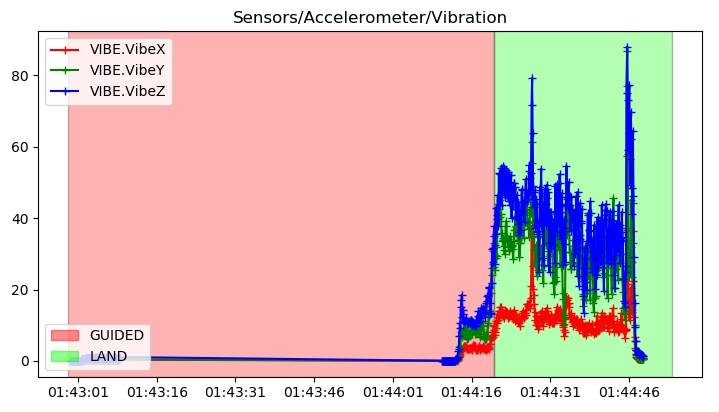
The IMU values show that you are within limits but could probably work on your vibration dampening or prop balancing or airframe flex or ….
There is quite an imbalance between your CW and CCW props.
that log is almost as bad as the other log. ArduPilot has a lot of internal redundancy and that is making it appear to fly OK, but in fact you are at high risk.
You must fix:
the vibration (aliasing, you need isolation against high frequencies)
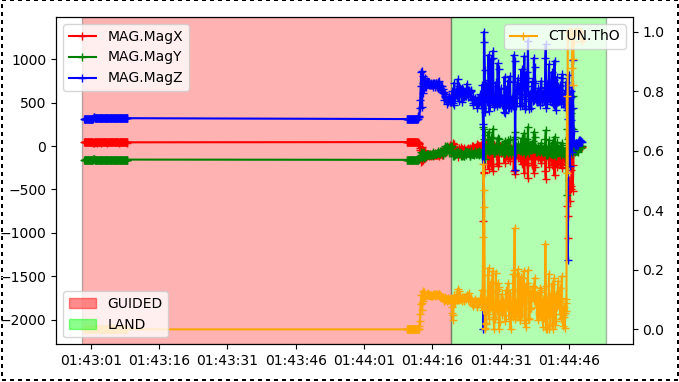
the compass, which is very bad
the power supply, which is giving much too low voltage (see the POWR.Vcc in the log)
I recommend you do a careful re-build, especially as you are flying multiple vehicles at once. The operator in that case has a high load, so you need to make sure the vehicles are very reliable.