I agree with you , these are specs on paper. There are not enough information to compare the product
Herelink use a customized version of QGC to confgure the radio
I prefer this solution , and i like the option to have an Ethernet port on air unit
I read the H16 manual air unit and there is the possibility to develop a custom program to use the network port. There will be a SDK…
I hope to see more review and information about thi product , it’s very intersting
There are some interesting things id like to get some answers on with this as as far as I am aware this works exactly the same as Herelink from a system point of view as this is based off the same SOC as Herlink uses, it does integrate Ethernet a little better but Herelink does also support it with adaptors as well.
With regards to QGC and mode selection this needs a little more investigation because as far as I am aware the same advise should be taken as herelink. Just to explain this a little more.
With the last major firmware Herelink has separated out Sbus control to a dedicate app just like this now does, however the advice is all mode selection should be done via Mavlink in the Ground station app and not sbus, this is why QGC is adapted to allow for this mode selection to be programmed to the buttons.
The reason Herelink advises users to not use Sbus is because sbus control is not at a HW level like you have with a traditional radio system, its all software based, while this is at a deep level within Android system there is still the very remote chance that should there be a glitch, crash or issue with the device an un-commanded mode change could happen. especially with an rc reboot.
Because of this the advice is to use Mavlink for mode selection as its not something that changes state, its fixed as it only happens when the message is triggered and sent.
Now you could look at this with realty and the actual chances of this un-commanded change happening is extremely remote however Phlilp has been clear he wants to give the safest advice to users he can.
Now I see this system working the same as Herelink in that respect as its again still a android based software radio system, Again using the same S1 chip set with the same potential as herelink.
Need to see what the first few users find, I have been trying to get one to try but at the cost of the Pro its not one im going to just spashout on and see.
I do know there is a bug update coming for QGC on Herelink shortly and users can fold their own too as Herelink is still fully open in that respect.
Interested to see the first user reports on this though.
Hi, is there anyone here with a T12 that they are willing to sell? I’m in canada, and one of my gimbals is defective, and I don’t know how to get one from Skydroid.
It reads only three PPM numbers - when the stick is low, it reads 1000. When the stick is medium it reads about 1600. When the stick is high it reads about 1900. But it does not read anything between those numbers.
I did not know if the problem was hardware or software, so I exchanged the two gimbals. The problem follows the gimbal, so the problem must be hardware, not software and not calibration.
I understand how to put it into calibration mode (turn on with C and D held down, then long press C, move both gimbals, long press C again, then power off). This does not fix it.
Your problem could be dirt on the cardan. Without connecting the Skydroid you should introduce alcohol into the defective potentiometer and move the cardan up and down several times, then wait for the alcohol to evaporate. could be the solution. by trying you don’t lose anything
I’m using a skydroid T12 for my drone, everything is working nice and the range is awesome!
But I have a problem with the independent joystick. When I move X3 (left/right), the pwm values are following the stick and then gimbal is following the stick. That is expected and it’s good.
But when I move Y3, it does modify the speed of the pwm values are changing.
I push the stick down, then pwm value start to decrease, the longer I put it down, the quicker it’s decreasing. I need to go up the stop the pwm value to decrease and make it increasing… And vice versa
Is there a way to change that and make the pwm following the stick as for X3? Maybe in qgroundcontrol? Or updating the controller? I can’t find anything about this issue…
Also, I can’t manage to get rssi with qgroundcontrol. It works nice with skydroid tower. I can see values in qgroundcontrol rssi but it’s like frozen…
Hi Robin @Robin_M, yes this is a known issue. The joystick pitch is great and for yaw you’ve got a joystick that behaves like a 3 position switch. Very annoying and I tried to write some lua script to bypass that but I wasn’t successful.
So we are stuck with it. I don’t see Skydroid coming to our help on this, they practically ditched us.
Gal @SKYDROID
Thank you for your answer.
That’s a shame! Skydroid needs to get rid of this king of ridiculous bugs…
I’ve replaced my t10 with a t12 for the joystick… It’s useless though…
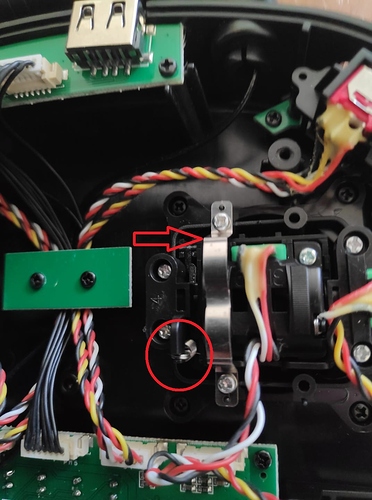
I need to make it proper Mode 2 with the stick down,not in the middle,but the stick return up (i remove allready the spring). So where sould i found an ather one bracket to add? Is any other solution?
 I need to make it proper Mode 2 with the stick down,not in the middle,but the stick return up (i remove allready the spring). So where sould i found an ather one bracket to add? Is any other solution?
I need to make it proper Mode 2 with the stick down,not in the middle,but the stick return up (i remove allready the spring). So where sould i found an ather one bracket to add? Is any other solution?
