Just tried it auwsume it just works, need to get small receiver for my 600mm wing,and thank you Ricky for the UAC holder works brilliantly.
P/S Cao overseas family love you
Just tried it auwsume it just works, need to get small receiver for my 600mm wing,and thank you Ricky for the UAC holder works brilliantly.
P/S Cao overseas family love you
Very nice!
Thank you Cao for the support!
Thank you Ricky for the Community Manual and Skydroid Dropbox.
The overlay works well and integrates it seamlessly with QGC. As a matter of fact, it works out better as it gives you the option to position the video wherever you prefer. Then, be able to record the video to boot! Excellent!
Thanks.
Hi Cala,Ricky and Greg,I have a small 600mm wing I can just about fit a M12L receiver in it,my question would it be o/k to mount my flight controlle on top of the receiver or would there be to muck interference,many thanks
I hope you not have problem, you have to optimice all if you want to go long range.but rx doesnt have reasons to interfere with Fc
Thank you Ale its a small strix nano goblin the M12L receiver is a tight fit and the only place for f/c is on top of it may wait till my other receiver arrives
Marty,
You can always try to mount it there and simply do a range check before the maiden flight. The Strix nano Goblin will get small very fast, so it won’t go far, unless you plan to fly FPV.
thank you Greg,yea as you say it will get small very soon but wanted to do a bit of fpv using my 10 inch tablet and the UAC + waypoint’s though im maybe on the wrong tracks with this ,not sure now
Marty,
Perhaps making sure the RSSI reading is valid would be a good verification before flying too far away.
Will do but would be really nice to just use the one radio now the Skydroid just suits and I could manage every thig easier with out 2 radios,its very nice looking at your set ups though I had a couple of bigger ones a couple of years ago
I’m having ESC issues with the PX4 Stack where the motor starts spinning once it’s armed. No one has yet have come up with a solution. In the meantime, I’ve got another Opterra 2m with APM 3.9.3 from an associate’s param file. I’m a PX4 Stack user but completely ignorant to ArduPilot. On the PX4, I just setup a channel to serve as an arm/disarm function QGC. It would be nice to assign, say, button D for this. Can this be done in ArduPilot?
@GregCovey you seem to have a lot of experience with ArduPilot. Any thoughts?
Thanks.
You can arm in Plane using either of the two ways below. The details are in the APM Wiki here.
Good luck!
Yes, I’m aware of those 2 and both work for me. So there’s no way to have the Tx do it other than the Rudder. Oh well.
Thanks,
In Arducopter there is a setting to spin when armed. Its something like MOT_SPIN_ARMED. I assume PX4 code has the same.
@rolly
Yeah, it’s FW_THR_IDLE that I’ve set to 0% but it didn’t help. Thanks for the input.
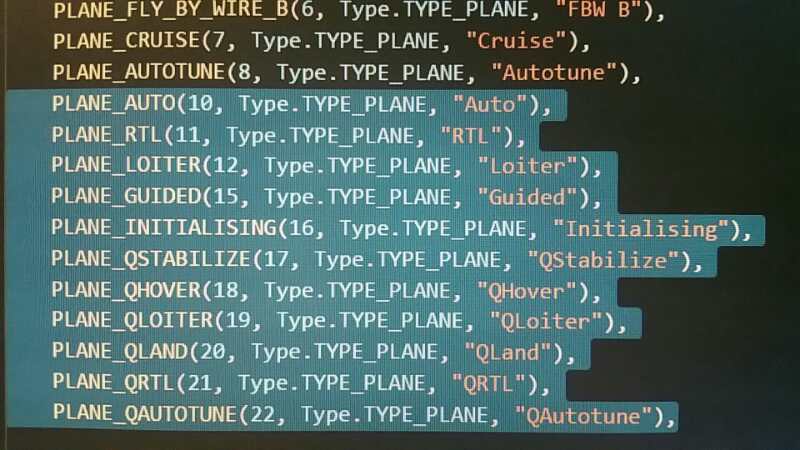
The surprise of vtol. Increased Q flight mode, airspeed. Open the data transmission hardware interface, support all Bluetooth and USB data transmission, previously binding hardware because of increased experience. Some experiences are acquired by combining software and hardware. Have a good weekend
Thaaanks Cao!!!. Looks @GregCovey what surprise we have, vtol modes add to Skydroid Tower 
Very nice, thanks Cao! I will update my tablet and take another look at the Skydroid Tower.
I did get to play with the Skydroid FPV app with the new suspension window and like it very much! As @rollys stated, it makes a perfect companion to QGC.
Cheers!
This might be more of an ArduPlane question than Skydroid but figured most everyone here uses ArduPilot. I’m trying to adapt the Skydroid to every Pixhawk system I’ve got.
With my Opterra 2m with Taranis QX7, I have a switch that increases the reflex by 25% so that after I hand launch throttle off then give full throttle, it’ll continue to climb. It’s basically the same function as SAFE mode in its stock BNF setup. Might there be a function or a parameter that can be triggered by a channel that can command the increase in the elevator trim? I know there’s TakeOff but without having the ability to mix channels, Flight Modes is pretty much limited to three.
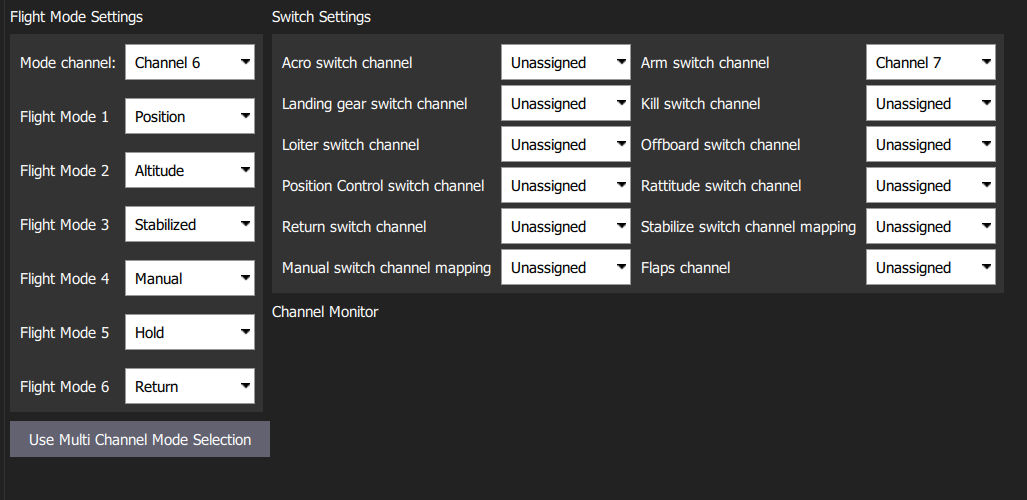
Or maybe, is there a way to assign a Flight Mode to channel? In the PX4 Stack, you can do this via QGC:
In Arducopter, you can assign a flight mode to several channels, which really helped for my Skydroid/Tarot setup, but not in Arduplane. It may be on the Arduplane new feature list already, but for now, all my APM Planes will stay on my Taranis.