You can select all the flight modes on Tower Beta that is one way to do it,but like you ive got the switch mixing on my taranis,its early days for this yet and rome was not built in a day
1 Like
Ya I have the position switch mod on my taranis. It works great, It speaks to me when I change flight modes so it all works great.
This will be a paradigm change, but it brings features you really don’t get with the Taranis…at least not as elegantly. Also their next version has HD video, so now your talking about your DIY drone and moving it into the realm of a DJI type interface, I have a mavic and love that interface. Just not a DJI fan, this gets me closer.
Also they are telling me they are building a new 10x camera, so I wonder what that means. Is it a gimbal, is it HD transmission, is it object tracking…I just think they could take us to that next level.
It’s all very interesting.
1 Like
yea it looks real promising,like you im not a DJI fan love my pixhawk/cube 2.1 and love playing with stuff this can be a very interesting and enjoyable journey
Here is what I am thinking.
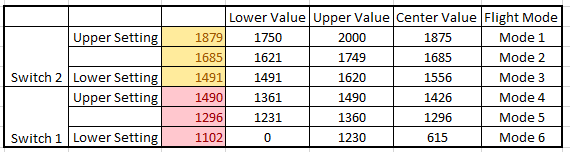
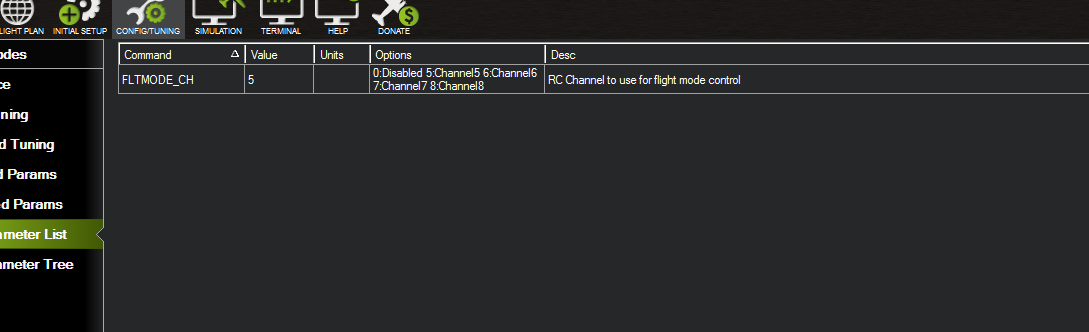
Set two switches for the flight modes. Set the first switch to channel 5 and the PWM range from 1102 to 1490
Set the second switch to Channel 5 as well with the Pwn range from 1491 to 1879.
Then see if that gives up 6 flight modes.
I have no clue if this would work, going to try it tonight if I can.
It also means keeping it straight in your head what the buttons do, also no idea if one button will over ride another.
1 Like
When will RC transmitter designers walk away from toggle switches for flying drones. There should be 6 soft buttons (ie real illuminated buttons but fully controllable – latching, non latching, radio buttons etc) on this – it is a drone controller after all. That is a suggestion and not a harsh critique.
2 Likes
I agree completely.
the device has 4 push buttons that if I recall are illuminated. However each is in affect a 3 position button.
Short press the high and low switch, long press the median value
I have flown. And nothing special occured, and it works very well! I’m currently testing different kind of special situations, like hovering drone and cutting down the power from transmitter etc. Those situations would cause sudden problems, so range actual range tests are not yet made.
MartyMcFly: You can select 3 flight modes with transmitter. With groundstation you can of course select as many flight modes you want. You can connect M12L (transmitter) via USB or Bluetooth to your computer and M12L works as a datamodem with telemetry link (115kbps speed) to aircraft so all procedures are available with Qgroundcontrol or Missionplanner. You are able to send missions etc, with phone/computer via M12L to airborne aircraft.
It is actually pretty good working combination and no more hassling with separate telemetry modems.
Here is raw picture which describes the actual idea of M12L -system
Main priority for controlling is Missionplanner/Qgroundcontrol etc and platform may be phone or computer. I have connected phone & laptop at the sametime to M12L, and telemetry link is still fast!. M12L as a radio doesn’t offer nothing but telemetry link. Of course control sticks and switches can be used with M12L and mapped with MissionPlanner.
Flight controller sees M12L and R12L (receiver) normal telemetry and sbus-signal link. So M12L saves lot of equipment to be carried in air. And of course less power is needed as well.

2 Likes
Marty, 3 modes can be selected with transmitter. All the buttons has 3 positions. With groundstation (phone/computer etc) you can select from all possible modes. So groundstation plays big role in this setup.

2 Likes

With groundstation you are able to link all the mode changes and all possible functions to computer joystick, one of mine old joysticks has enough buttons, including sliders etc. So role for transmitter in this case is pretty minimal.
2 Likes
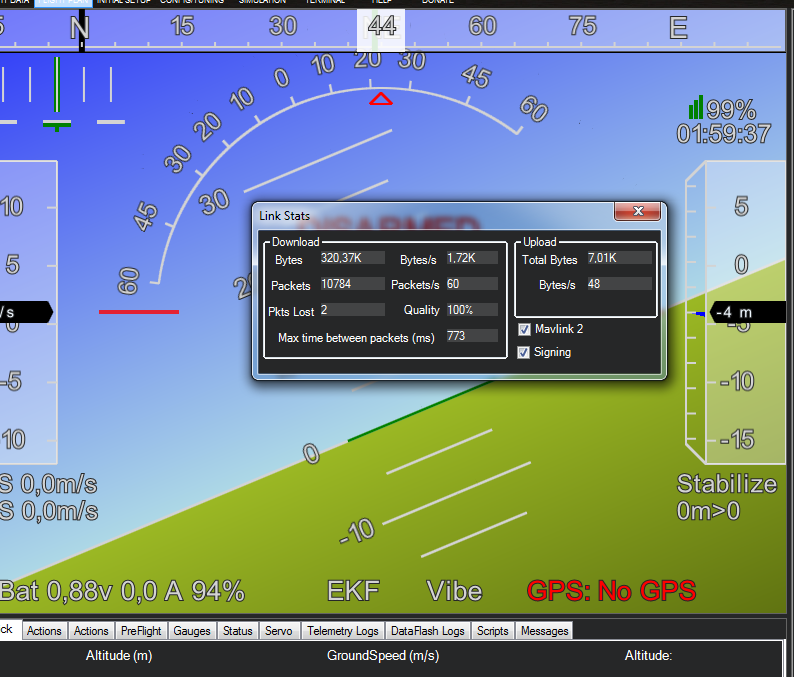
Telemetry link works well, this is main and the most important feature of M12L setup, transferspeed (upload/download) seems to be stable even I carried RX&FC side around (few hundreds meter from groundstation). There were houses, trees, cliffs between rx & tx, so In clear air there shouldn’t problems to achieve long ranges. Nice!
2 Likes
Nice bit of info Tom.
since the flight modes are accessible from the Tower app (Mission Maker for Ardupilot) I will just use that I think instead of worrying about switch settings. I will have one three position set for the three main flight modes.
Stab, Poshold and RTL. The rest will come from the GCS.
1 Like
Great work Tom,this is auwsume just need to get funds together to buy one,both Rick and Tom thank you for your hard work,Marty
So I started installing my first receiver in a quad this morning. First I needed to mod the antennas as they still had the large cumbersome rubber ducky’s. Luckily I remembered that I had some replacement antenna for a FrSky receiver that had Ipex connections. soooooooo. I pulled the unit apart, swapped out the old antennas.
Now I just need to get the unit mounted into my quad. It means I need to rewire the RC input as it’s now a different receiver but I can have this done for the weekend.
If I can I will get it out and tested this weekend…assuming the weather.
In the mean time here is a view inside the receiver.

Here is the old antenna versus the new.

now to install it in this quad.
This is great I get to loose the existing telemetry modem and antenna…so save a bit of weight.

2 Likes
I’d like to know what kind of transmission protocol and technic is used between rx & tx ? is it encrypted ?
1 Like
nice! you are also near to going flight! I took R12 out from drone to benchmark telemetry in different situations.
1 Like
I get the impression its’ working pretty well for you.
1 Like
yes it works well. Only worry is that rx gets pretty warm/hot during long sessions. Maby heathsink would help and cold air. It is -10C here currently so warming problem doesn’t bother outside., But I try to get it airborne again later this week after after weather gets little bit warmer.
1 Like
Yes I had observed that the RX was getting warm, it would be interesting to determine what component is getting hot and putting a heat sink on it. We should let Skydroid know what the observation is.
It’s around plus 3 today and rain most of the week. It appears that the weekend my be crappy as well. But I will get my machine done and at least calibrate it and do some basic testing.
Any idea of the range you have tested two so far
1 Like