I appreciate very much for your help: Greg, Rollys, RickyG… However here is my problem:
Greg, the link that you showed me is the "Equipment Assistant "Apps for Android (I have installed this app.). What I need is the “Device Assistant” or “Skydroid Updater Helper” for Windows (I can not find the link). Rollys clearly showed the “Skydroid Update Helper”, but sorry where is the link?
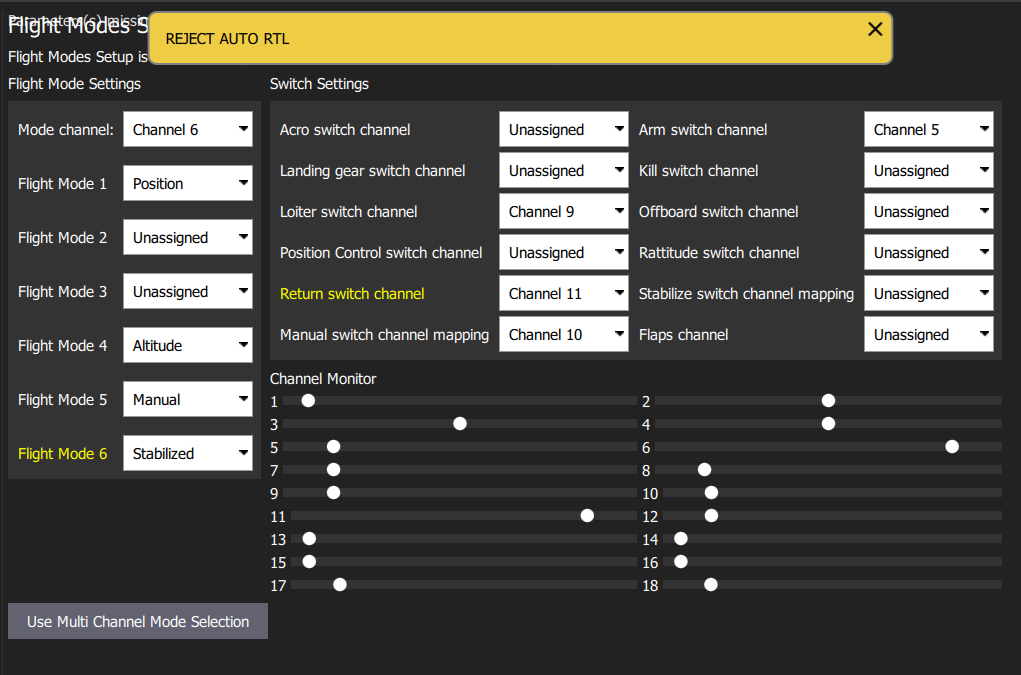
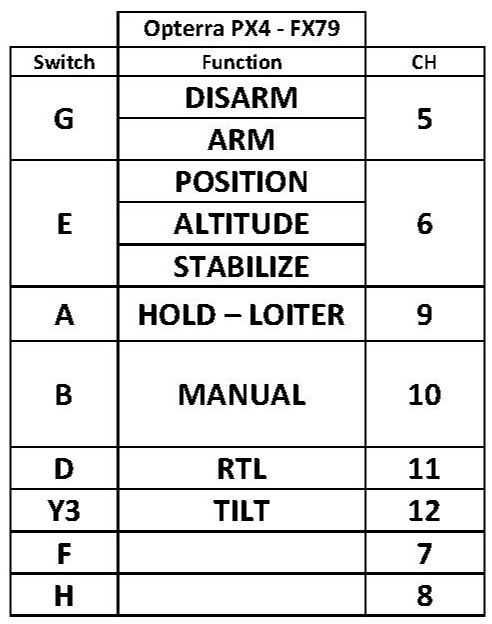
I am also still trying to program all the switches to enable the six Flight mode, but not yet succeed, because in Taranis I only use Channel 5 to manage this Six Flight mode. On M12L seems we can not combine two switches using only one channel, like in Taranis. Any idea how to do this?
My best regards,
Tony
I ditched the HobbyKing Tx tray and decided to made a “holster” for the M12L so I can mount it on a Tarot Tx tray instead. It’s made from Kydex Gunmetal Gray, a material used to make custom fitted gun and knife holsters. I heated it with a heat gun and “molded” it around the Tx case by hand. Needless to say, I was very conservative on heat application on it to minimize the heat transfer to the M12L. It’s rough at the moment until I can prove it works for what I’m looking for. I just have the holster mounted with 10lb Scotch clear mounting tape.
Thank you Greg, Ricky. I have updated the firmware both Tx and Rx. However I am still curious why the Skydroid Updater software is in Chinese without any option to change the language to English. In fact I have downloaded the Updater software both from Ricky’s drop box, and from Skydroid web .
Greg, again that link is for Android mobile, not for PC windows. Sorry to bother you for this thing. But I am curious about the latest English version of the Skydroid Updater for PC Windows. What I got so far is the Chinese version without option to change Language to English.
Sorry about that…I saw “updater” and went with it. I’m at work and most of these links are locked out…including Dropbox. I think you want the .rar file from Ricky’s Dropbox. When you open up the .rar, the PC software is in a folder.
I was able to download the ZIP file from Cao’s post directly from here. After you unZIP the file, run the file in the folder called SkyDroidUpdater.exe. It is the newer version so I suspect that you simply missed the pull-down menu at the top to select “English” for the language setting.
Thank you Greg, Ricky I will try again later. Another important issue about how to setup a channel for RTL (panic button). Let say Channel 7/8 for RTL like in Copter. Anybody can do it with ArduPlane?? (Actually mt plane is a Vtol) that needs at least 4 Flight modes including RTL. I saw in copter this function exist, but why not in Plane ?
There were reasons that my initial testing with the Skydroid system was with Arducopter and not one of my many VTOLs. A VTOL is like flying two vehicles together and losing the 6 flight modes is not a good fit. The Skydroid system is really designed for an autonomous drone so my choice was to initially test it with my Tarot 680 Pro hexacopter and GoPro gimbal. The extra modes like RTL can easily be assigned to a spare button or switch. So far, it seems like a great fit!
Hi Rollys Thank you for your info about the Px4 stack firmware. I have some basic questions regarding the Px4 stack. Maybe somebody may share here (just basic info.).
1). What is the key differences between these two firmware? (Ardupilot Vs.Px4 or Px4 pro???)
2). What is the key reason we use Px4 stack instead of Ardupilot??
3. Which one is more superior in term of reliability and Stability especially for Vtol???
Thank you.
I got a chuckle out of your questions, not because they were bad, but because there are not simple easy answers and the topic is not part of our thread subject. Do some searches and you’ll find your answer. The fact that you are on an Ardupilot forum may be a good start. Here are some threads from a few years ago.
Rollys is our resident PX4 expert and often shares his experiences. Without him, I would know much less about the PX4 stack and implementation. Perhaps he has some links to share.
I don’t mean to clutter this forum and if further discussion needs to take place, we’ll need to move it somewhere else. Links from @GregCovey should suffice. I was a newbie hobbyist with interest on VTOLs and didn’t want to learn a “new language”. The integration of slide bars in QGC for tuning was so simple for me, i.e. if it does this, slide it to the left; if it does that, slide it to the right. Consequently, the time between bench and stable flight was accomplished in one to three flights.
As it turns out now, switching my RVJet VTOL from Taranis to the M12L is much less of an issue since I can assign the push button switches to flight mode channel assignments. That eliminates my need to mix two switches with a single channel for flight modes. The mental transition for the simple mind like mine will not be as traumatic, ergo the cheat sheet right in mobile device stand gap.
I spent some more time with my Skydroid setup on the Tarot 680 Pro and decided that we really don’t need more flight modes via the switch because they are all readily available via the apps like QGC or MP. I haven’t used Tower. So it is important to have some basic flight modes set up via the switch for emergency loitering or RTL but it seems the paradigm shift is in simply using the GCS app. Less R/C, more autonomous.