Hi, i flew a HEXAROTOR with copter 3.6.0 today, and all seems good in the beginning. But when i give a roll control with mode loiter, sometimes the copter rise and i can not throttle down it, and the copter have very week response to throttle down command. i doubt it is the vibration cause the problem, but not sure about this.
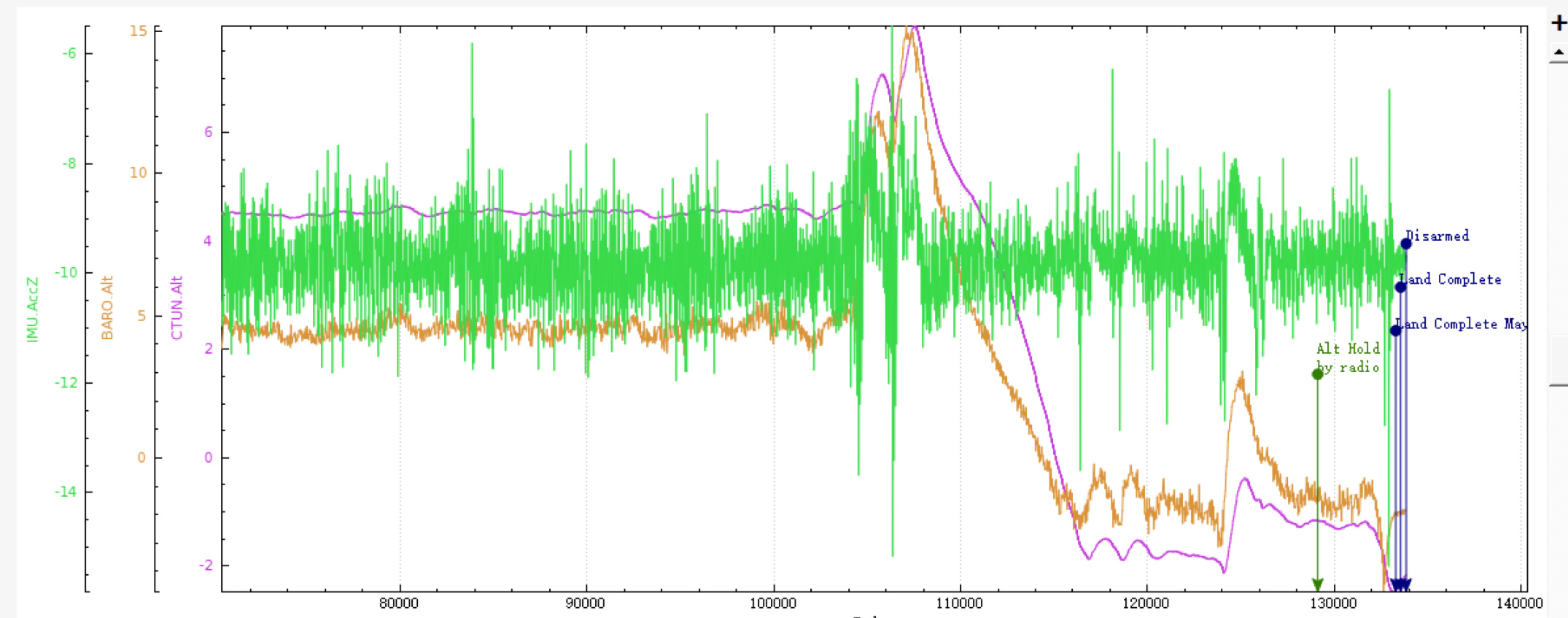
the ctun.alt - baro.alt - imu.accz data as follow:
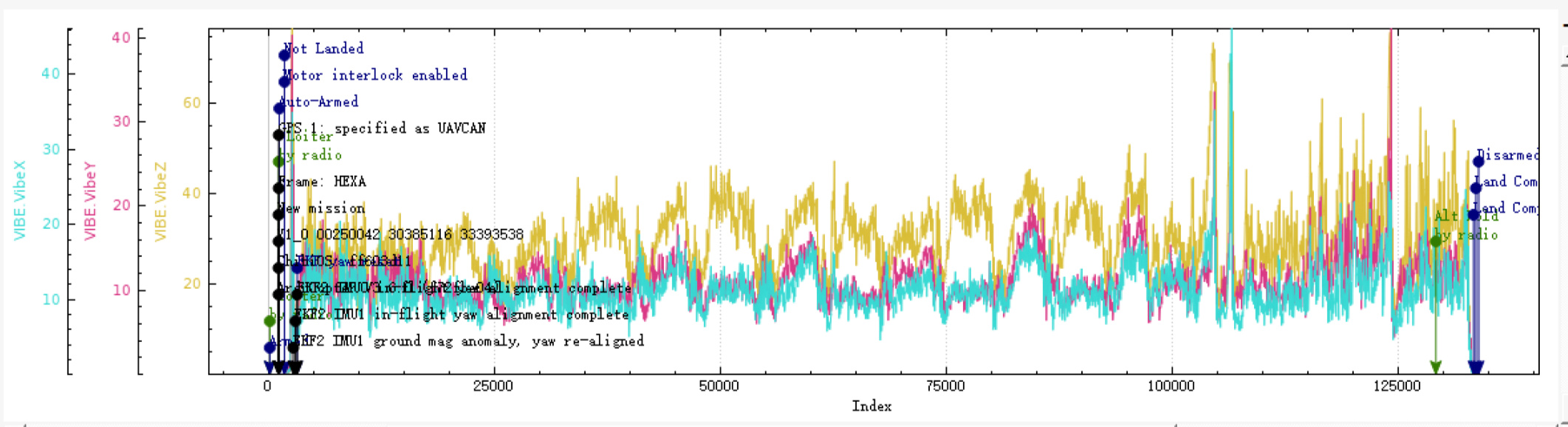
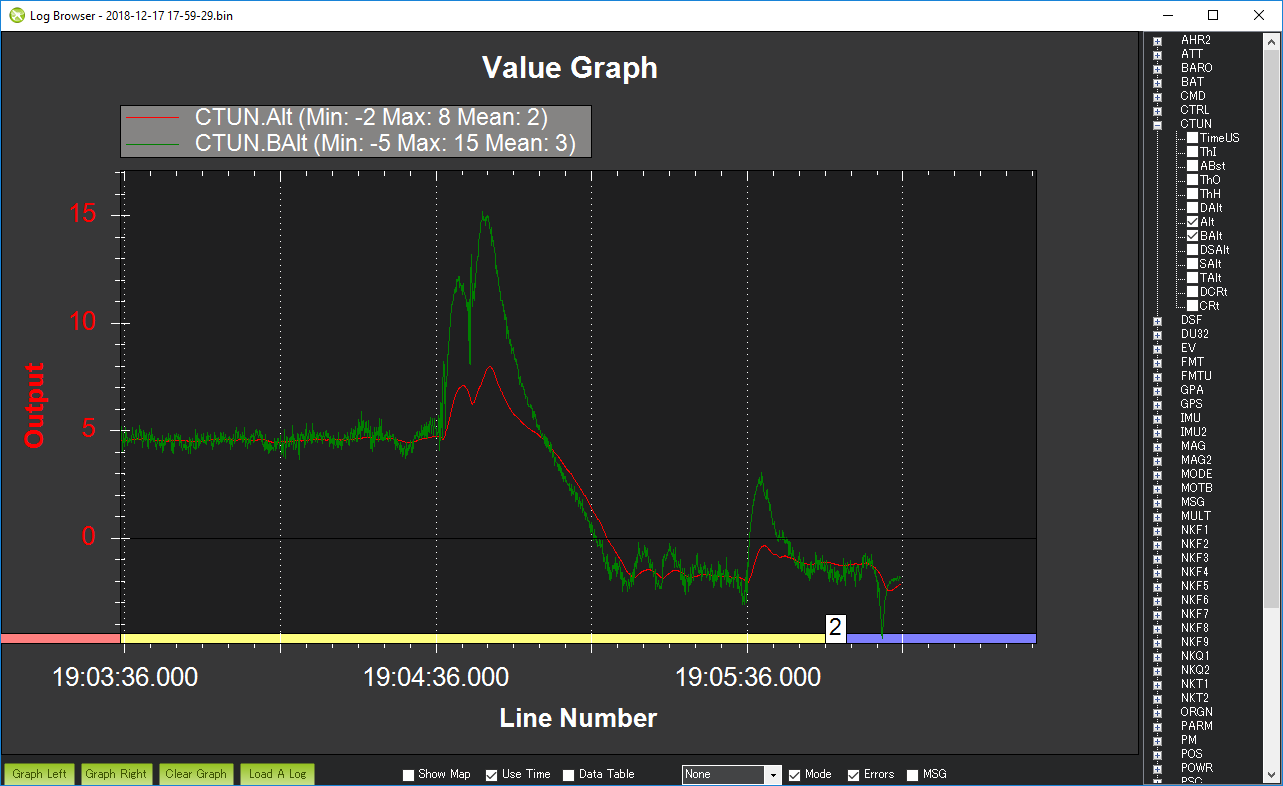
Yes, I agree that the issue is most likely vibration. The Vibe.Z in particular is regularly up in the “grey zone” (between 30m/s/s and 60m/s/s) and the altitude estimate look far off. We can see this by comparing the CTUN.Alt (EKF’s altitude estimate) to the BAlt (barometer altitude).
hi,rmackay, thanks for reply.
I am confused with the log.
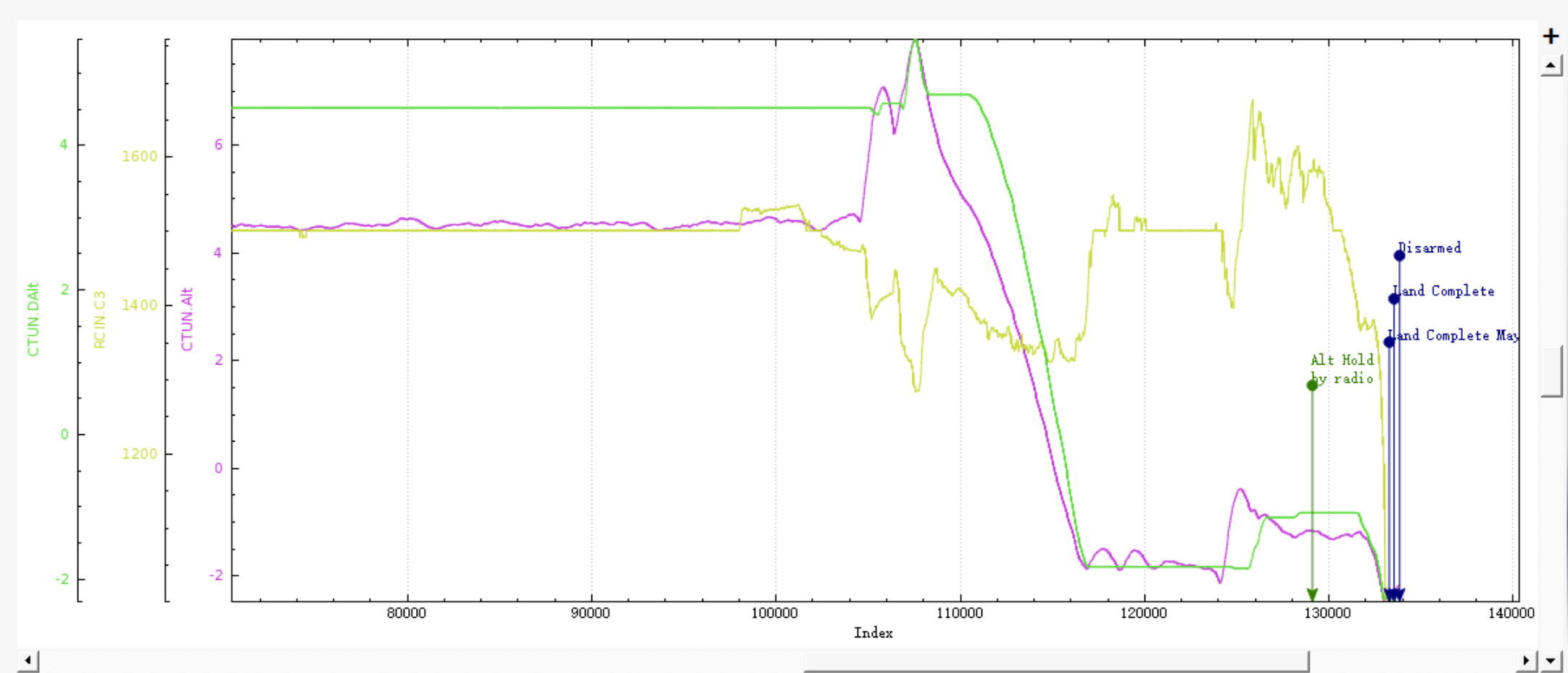
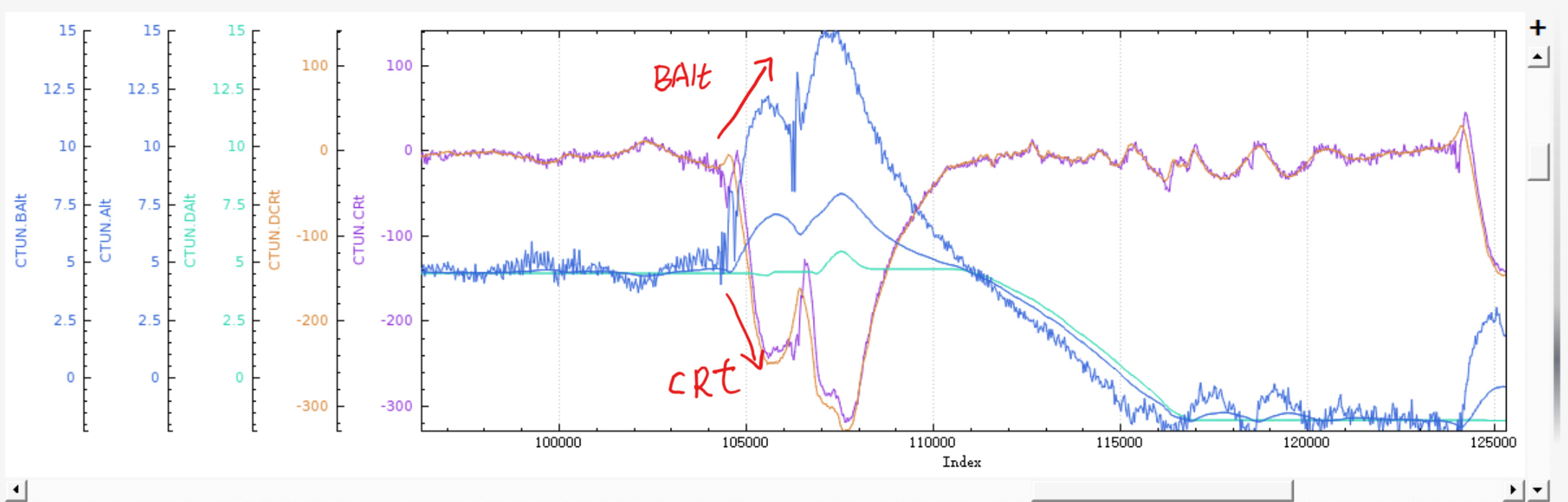
as the picture show, the copter goes up, but the climb rate get a minus value, the ctun.BAlt and ctun.CRt go different direction. why this happen?
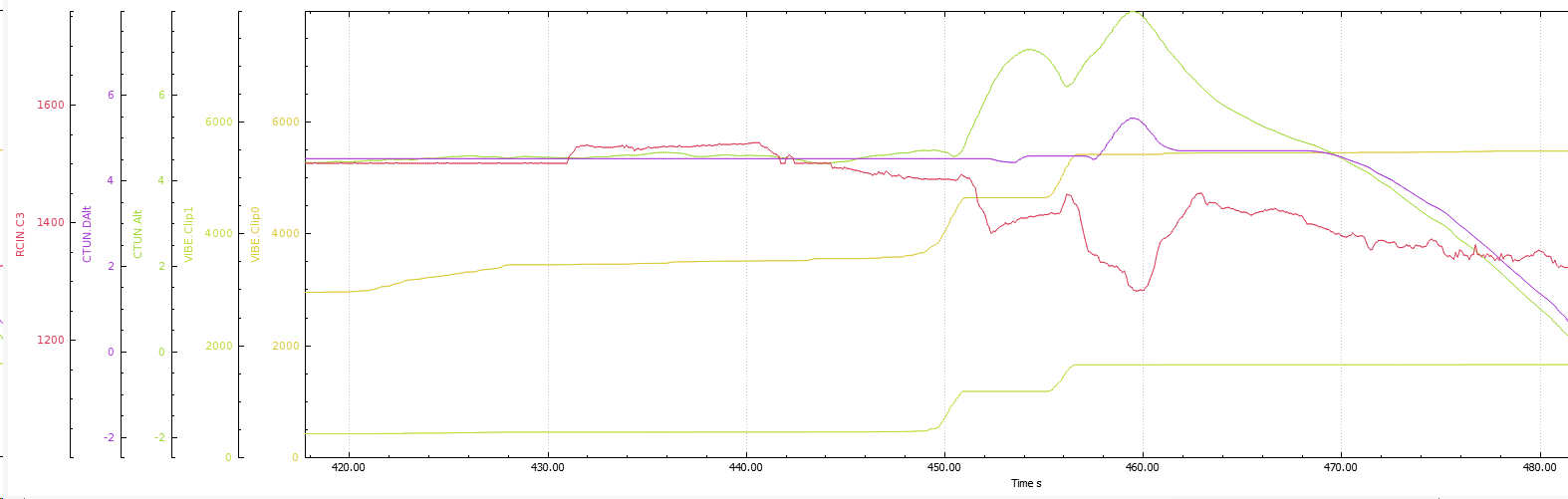
This happens because the EKF is confused and is estimating an incorrect climb rate and altitude. The EKF becomes confused because the vibration levels are very high. The IMUs have a limit as to how many G-forces they can read and when the accelerations (caused by high vibration levels) go beyond this it loses information. The clipping events can be seen by looking at the VIBE.Clip0 field.