I am at a loss as to the issue with my quadcopter when I switch it into Loiter mode. Whenever I put the copter into Loiter mode it maintains height but drifts and doesn’t respond to any controller stick movement (throttle / yaw / roll / pitch) meaning I have to switch out of it quick. I haven’t tried any other GPS based modes which I assume are affected as well. Stabilize mode and alt hold mode work great as well as simple mode (thus I know the compass is working). My current setup is as follows:
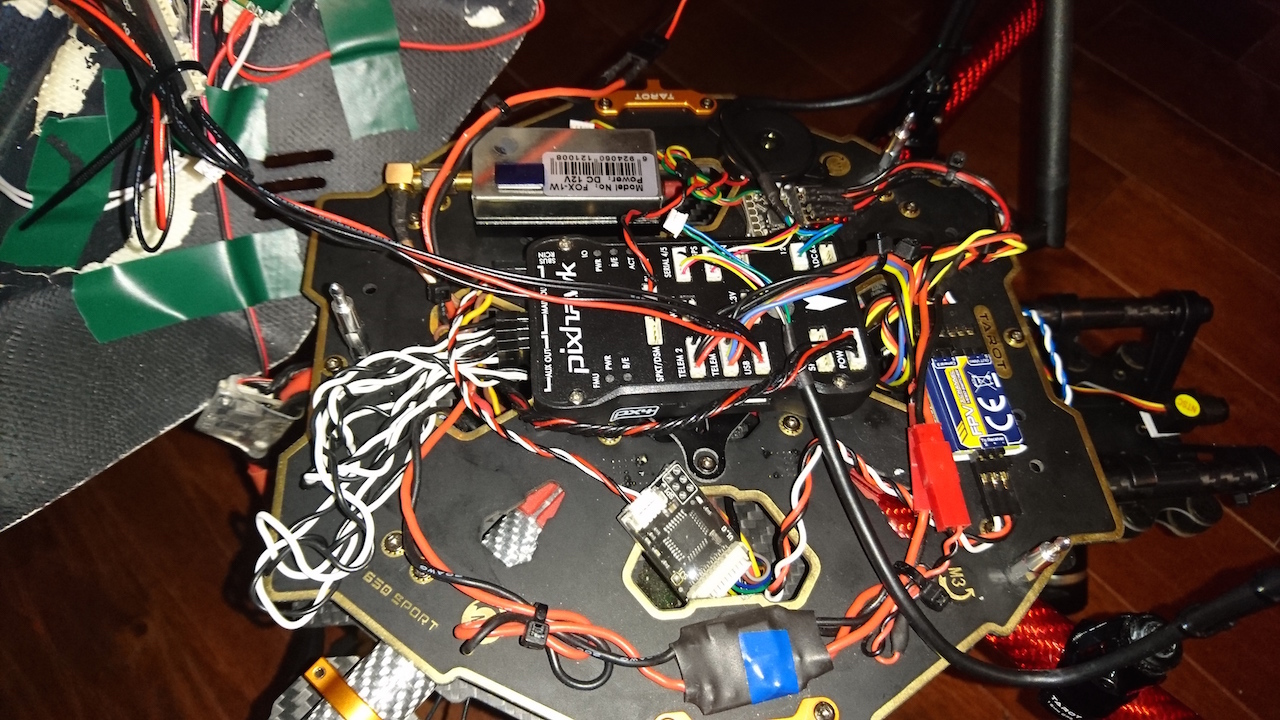
FC - Pixhawk (latest V3.3.3 firmware)
GPS - 2 x M8N
Transmitter - Frsky Taranis with L9R receiver
Telemtry radio - 915 mhz
This issue has been present from the start with this copter even though I regular pickup more than 10 satellites on both GPSs . The troubleshooting I’ve done is as follows with no change in Loiter performance:
FC - upgraded the firmware / set the parameters to default
GPS - switched out the old GPS for a new one which I know works, added an additional one for redundancy, and elevated the position of each GPS to reduce MAG interference
Wiring - double checked the connections to the Pixhawk
Some pictures of my current setup attached. Help as I’m out of ideas!
Hey, ok so I disconnected the 2nd GPS and set the log_bitmask parameter to 655358. I flew the copter and tried loiter again with no success same issues. Just a slight correction from before in that I do have throttle and yaw control but no roll/pitch control.
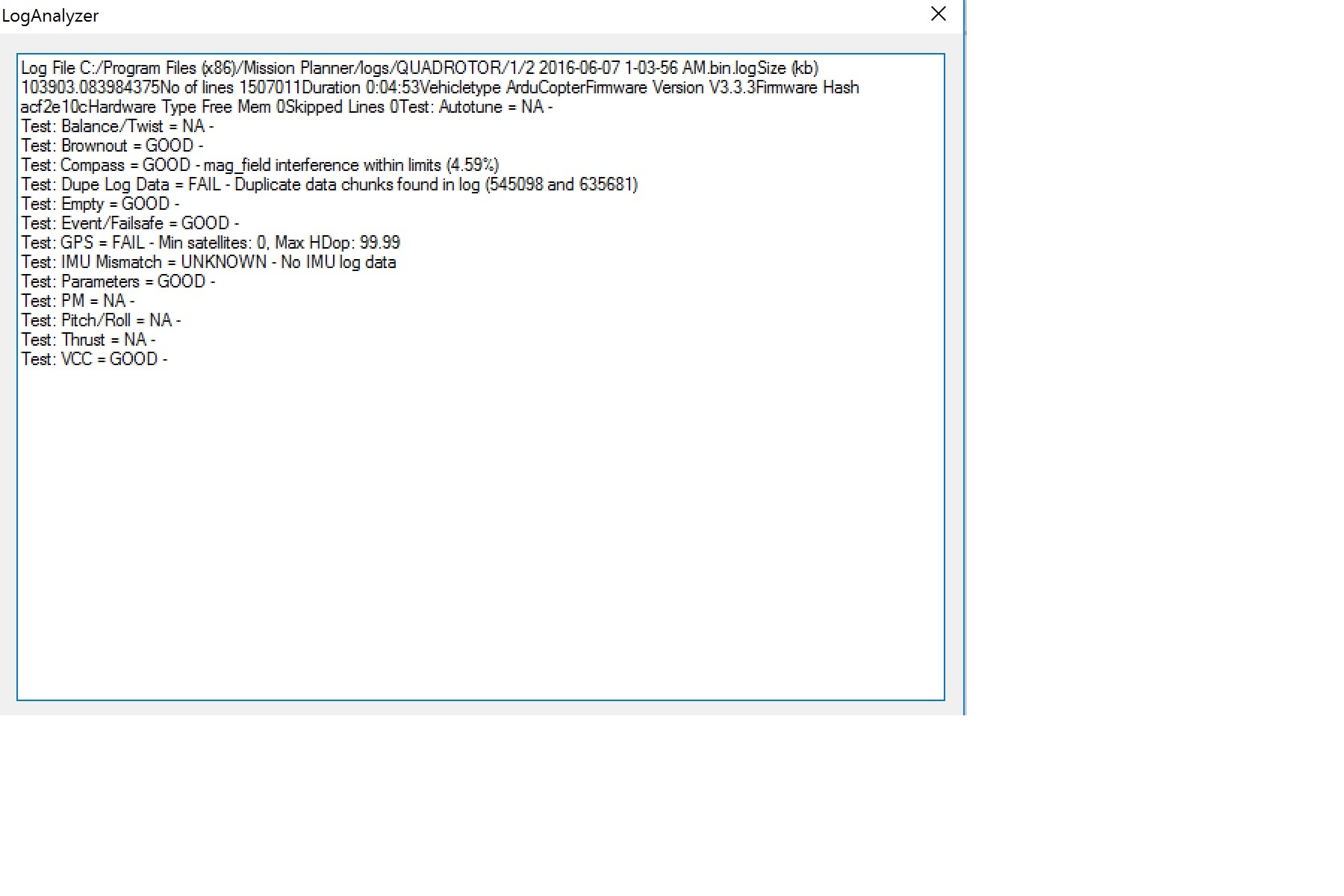
The auto analysis of the flight log gave this result:
I have no idea why there would be a GPS fail as mission planner shows a lock of more than 10 satelites when I was flying. Not sure what an IMU mismatch would mean either.
I’m rather new to the logging aspect of Mission Planner and will need some direction. I downloaded the log and the bin file is like 100mb. I can pass it along if you know of a way to send such a large file? Otherwise if possible please let me know what I should be looking for and I can try to pass along screen shots. Thanks for your help.
About logs, what people do is do place them on s shared storage like dropbox, onedrive, googledrive, etc and place a link here. It’s only the BIN file.
Ok the problem is SOLVED. I switched out the Pixhawk for a Pix Lite (Pixhawk varient) which the loiter does work on, loaded the Pixhawk parameters, and guess what the Loiter still didn’t work. Clearly this told me that the issue was a parameter issue.
I reset all the parameters back to default in V3.3.3 and then manually updated the important parameters, recalibrated everything, etc… and voila the Loiter worked. I then saved and loaded these new parameters from the Pix Lite onto the Pixhawk, switched out the FCs, and now the Loiter works on the original Pixhawk. I can only surmise that updating the firmware before on the Pixhawk did something odd with the parameters which caused the issue.