Hello all,
For context I am flying a larger quad with 15 in props. I have a center of gravity biased to the front motors, my quad is not perfectly balanced (on purpose).
For a long time I have operated with a Pixracer r15 with no issues. In high winds or without, my quad has always flown with a high degree of pitch stabilization. However, after swapping to the Pixracer Pro (using nearly the exact same ATC tunes and identical loiter parameters), my quad now oscillates in pitch. I have been hot swapping FCs onto my frame, re-tuning both, swapping FW versions on both. The only constant is that the r15 handles forward flight with stability and the Pro will oscillate heavily.
On the Pro, switching to Althold or Poshold eliminates all oscillations. <— I feel like this fact may be the key detail that helps me find the root of my issue. Just a gut feelings at this point though.
I will attempt to add the bins I have later, for now I can only provide snips of graphs. (These may useless)
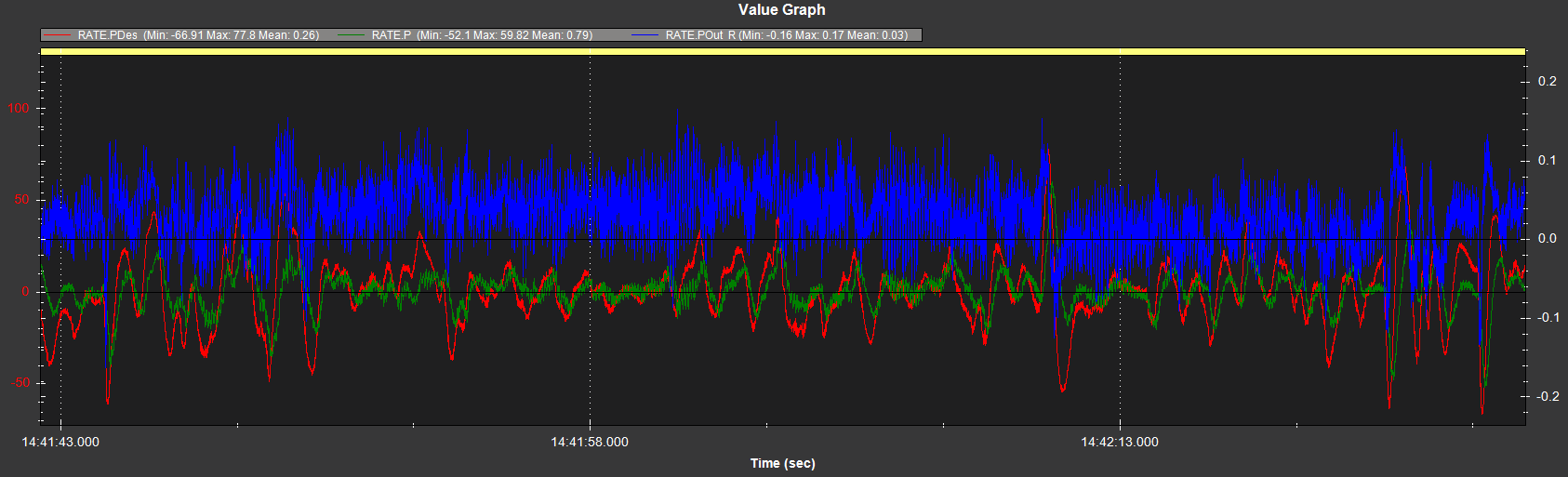
r15 Rate Graph
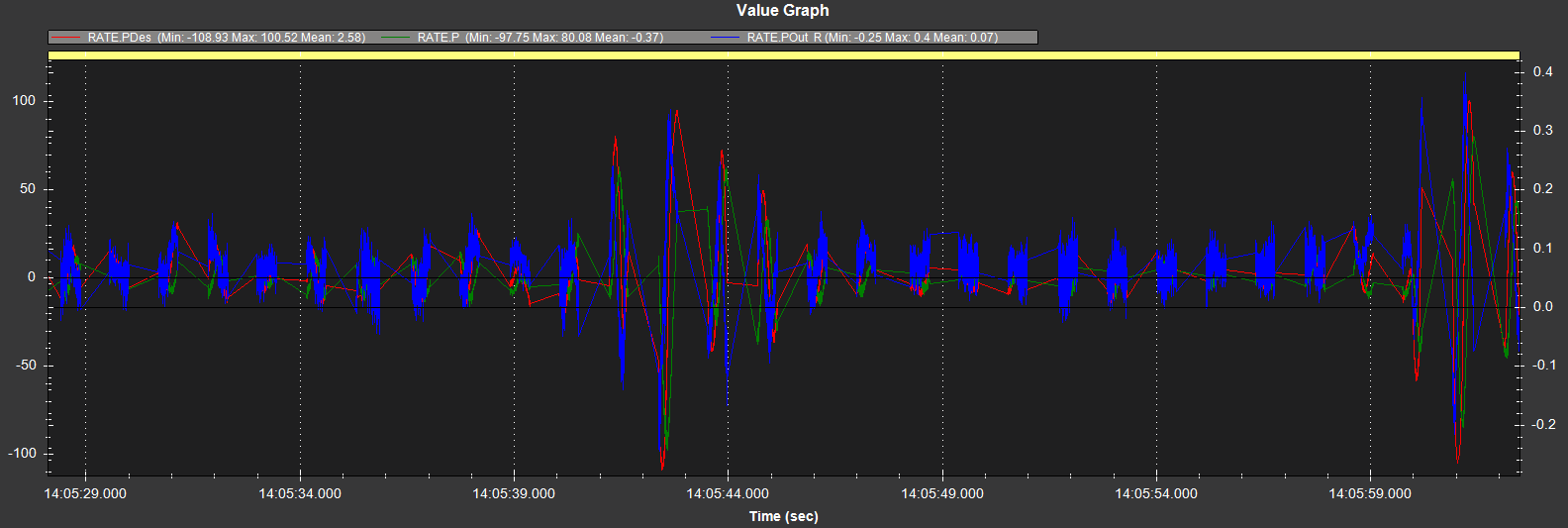
Pro Rate Graph
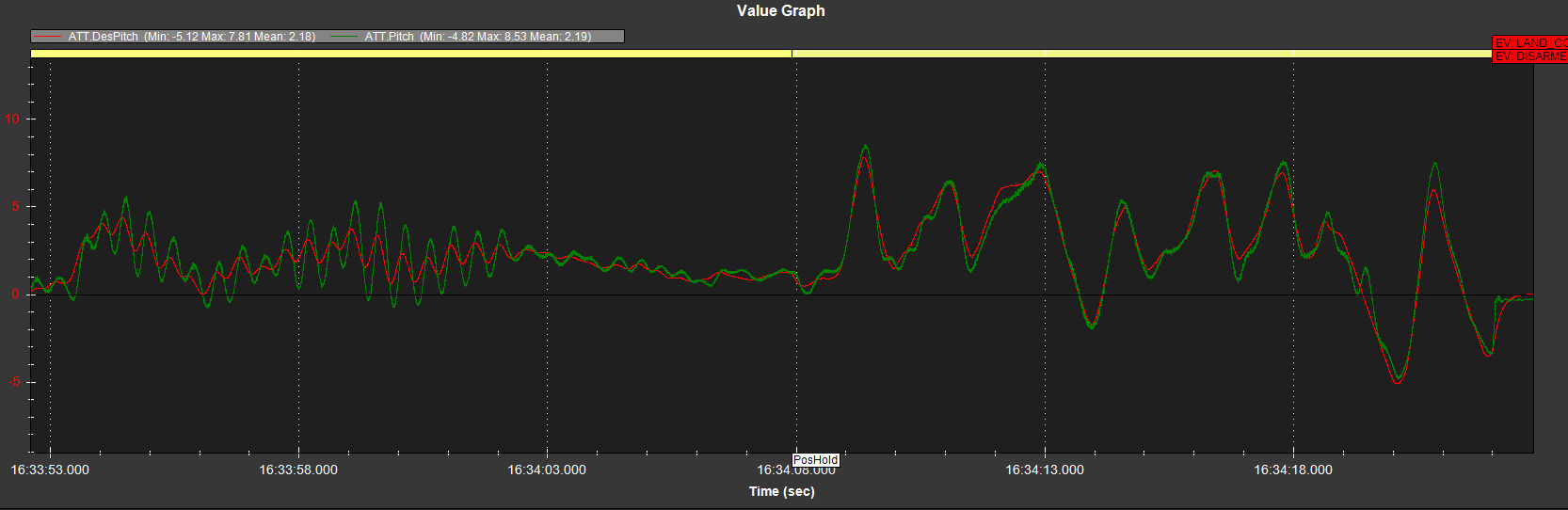
r15 Pitch vs DesPitch
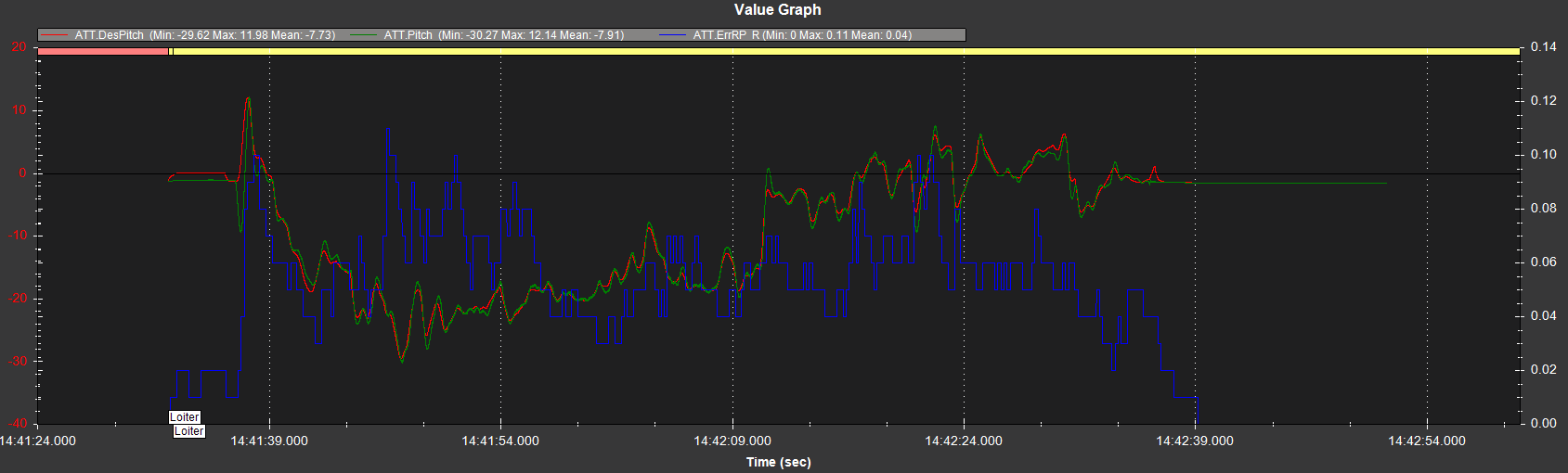
Pro Pitch vs DesPitch
I have not yet started manually down tuning ATC or PSC values to eliminate the issue. If I go that route I will begin with PSC values first.
My question for this forum would be as follows:
Does anyone have a similar experience?
What would you recommend as a path to begin eliminating this specific behavior?
What aspects of the datalogs might be useful to diagnosis this issue?
Bonus questions: Notice the big gaps in data on the “Pro Rate Graph”, why might I be losing tons of fidelity in my data logs. I may switch SD cards and reduce overall logged data to see if it helps.
Unfortunately, I cannot use PosHold or just keep on with my r15 moving forward. So I must solve this Loiter issue with the Pro.