I was flying this aircraft in ALT hold prior to autotune. Aircraft yawed immediately on takeoff and I had to hold a correction the whole flight before it hit the fence and then crashed. Can someone please take a look at the logs and let me know what was going wrong?
Hi there. I haven’t looked at the logs yet but I’ve moved this from the “Blog” category (which made it appear on the front page of ardupilot.org) to the Copter-3.6 category.
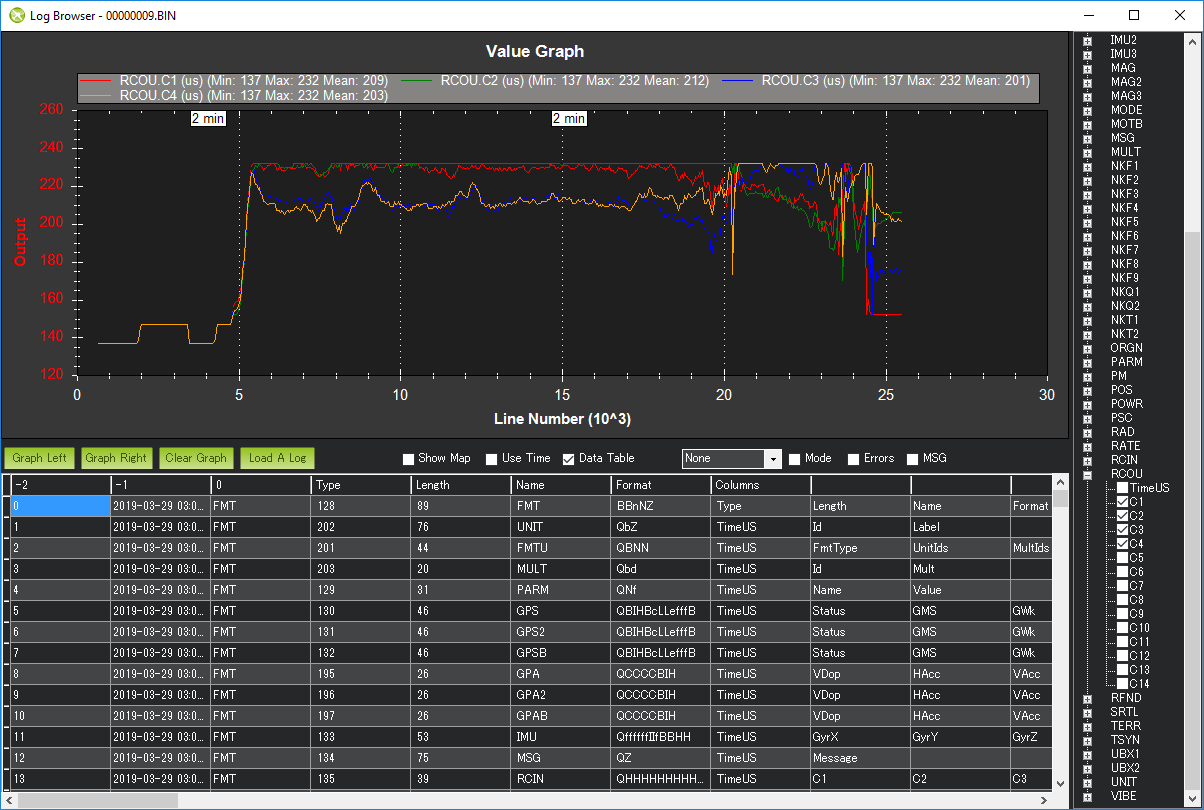
it looks like the vehicle is a bit under powered and/or it has a motor imbalance. In short two of the motors hit their maximum. When this happens the vehicle needs to make prioritisation decisions about which axis to lose control of. Normally yaw goes first followed by altitude and then finally roll and pitch.