I was flying this aircraft in ALT hold prior to trying to begin an autotune. The aircraft had a left yaw on takeoff and I had to hold a correction the whole time. It then hit’s the geofence, goes into RTL, and then descends instead of climbing to the altitude. Any help would be great. I have attached the log.
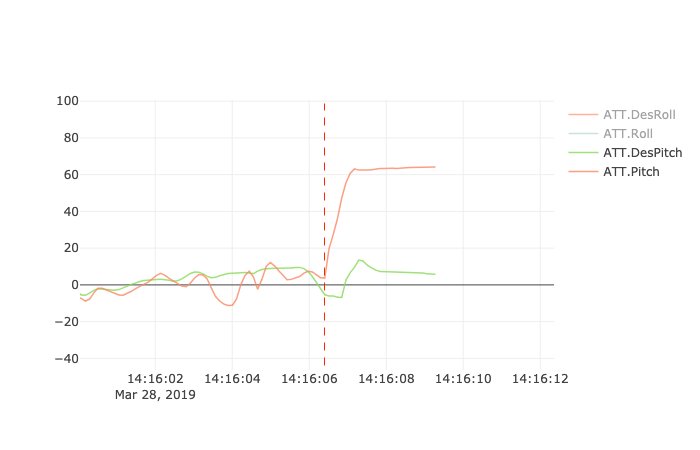
I noticed that at 14:16:06 is when your drone seems to do something unexpected, the FC is trying to keep it stable but the pitch stays consistently off the desired value.
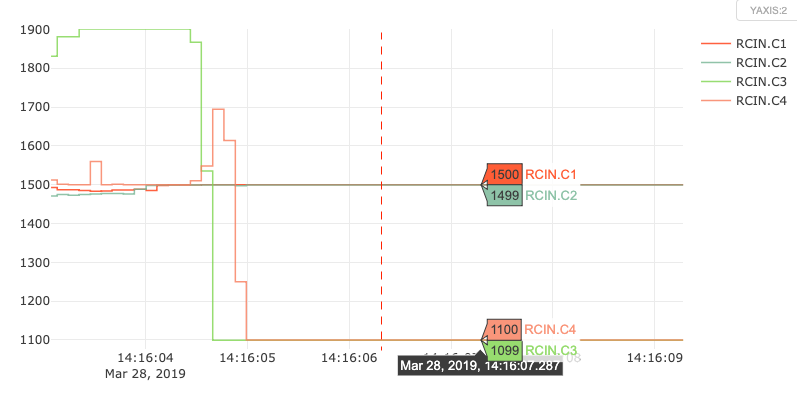
Your stick inputs are kind of strange, although they don’t happen at 14:16:06, but rather before that. It says YAW (RCIN 4) & THROTTLE (RCIN 3) were set to lowest value, that is assuming default RC channel maps (http://ardupilot.org/copter/docs/common-rcmap.html).