Hello copter heads
It will be helpful if some can read my flying log & help me identify any problems with the system.
I was flying the drone with no problem but suddenly the drone experienced something which caused the drone to flip & fall on its back.
Will really apricate for the inputs are I will help me improve the system.
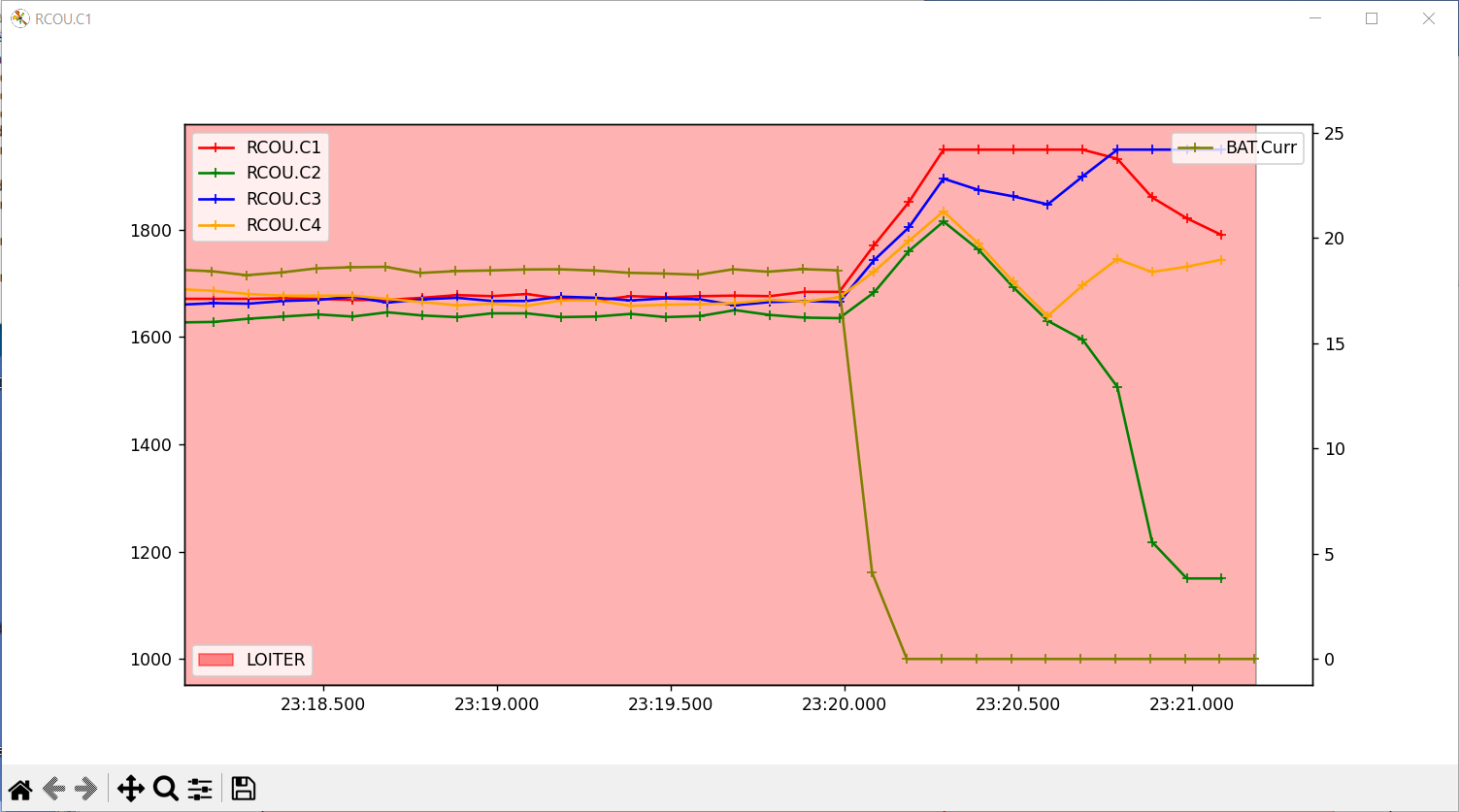
Since all four motor’s command when to full, but the current dropped off to nothing I would say you had some kind of power failure. Check the power leads between the voltage/current sensor (because you never lost data, and the FC kept running) and your ESC or PDB. It’s all four motors so I would look at something that would be a common point for all motors. Are you using a 4-in-1 ESC, if so the power wire to the ESC. If you’re using individual ESCs then check whatever you’re using for power distribution.