Hi, I have to create a auto mission where I want drone to head towards next waypoint for few waypoint and for some I want to lock heading (While flying left and right of the object). Is it possible with any command in mission planner?
Check out the condition_yaw command.
Mission commands
Hi Dave, I am planning to use that if i don’t get other solution. But using that, it will face next waypoint after that command. It might be because, I have set ardupilot parameters to face next waypoint in WP_Yaw_Behavior. If I disable that, I have to define Condition_Yaw after every waypoint…I was searching if there is any command to lock and unlock the heading in mission planner for waypoint planning.
Are you looking for the ROI? (region of interest) This will cause the drone to face a fixed point (until you cancel or reset the ROI) DO_SET_ROI
1 Like
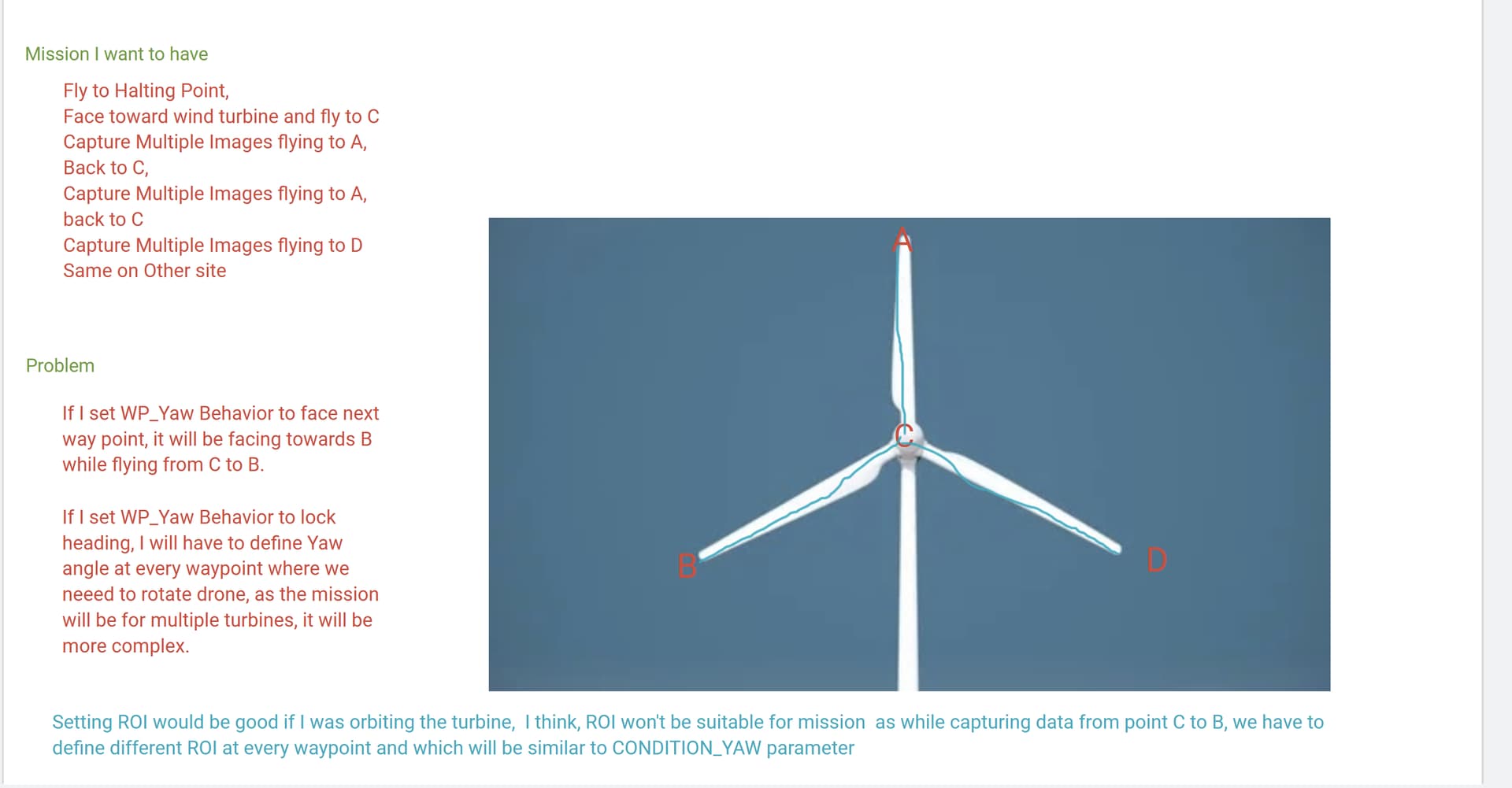
Hi @Allister, Thank for your response, I don’t think, ROI would be suitable for the mission I want to fly. Can you please look at the image for clear idea of mission and suggest me better solution for this scenario.
I’m not sure why heading lock won’t work for you? I’m assuming you want the drone to face the turbine blade as it travels from C to A to C to B to C… the heading lock only locks the compass heading, not pitch, so you would only need to set the value once per turbine. You’re going to need to adjust the plan for the location of each blade and direction of the tower regardless.
