I’ve requested access to the logs for my gmail account. I should be able to help once I have the logs.
I’ve requested access to the logs to take a look. Please check google drive for access requests.
So sorry! I didn’t realise they were private.
no worries at all. I’ve looked through the logs and it is clear your scale factor is around 0.8, which is lower than the minimum we allow of 0.84.
There are a few possible causes:
- most likely is that this is my fault. I had made an incorrect change for RM3100 compasses scale factors in a previous release and I suspect the firmware on your location one is using a firmware with this incorrect change. Unfortunately these logs don’t tell me the firmware version on the GPS. See below for how to update GPS firmware.
- your location has a different magnetic field strength than is expected in the WMM tables.
- your airframe is distorting the magnetic field more than expected.
The really interesting log is your Here2asref.bin. Are you sure that is the Here2 GPS? It shows a single UAVCAN GPS, and unfortunately I can’t tell from the log if it really is a Here2 or not. The reason it is interesting is that it shows a mag cal failure with almost the same radius as for your other logs. That would suggest that it is a property of your vehicle or where you are testing. I suspect though that you may have mixed up the logs, as your comments suggest the Here2 is passing for you, and this log is clearly failing.
Could you please try updating your Location-One following these instructions:
https://ardupilot.org/copter/docs/common-slcan-f4.html
using this firmware:
https://firmware.ardupilot.org/AP_Periph/latest/f303-M10070/
alternatively, I’ve put a firmware for your CubePurple that expands the range of allowed scale factors here:
http://uav.tridgell.net/tmp/plane-CubePurple-scale-max.apj
if you load that then it should allow for the scale factors you are seeing.
Sorry it took me so long to look at this.
Is this updated again? Because I was on stable(same bad radius), then moved to latest. I’m currently using latest firmware for M10070.
Yes. It is indeed Here2. Hard to tell from uavcan perspective.

Here2 calibrates every time without any issues.
Also something to note, I’m able to calibrate rm3100 when GPS is disabled.
I’ll try this and update you!
thanks. mRo also sent me a location-one recently, and I set it up on a heavy-lift quad today and did a test using the latest f303-M10070 firmware. The compass worked well, with a 1.0 scale factor and performed well in flight.
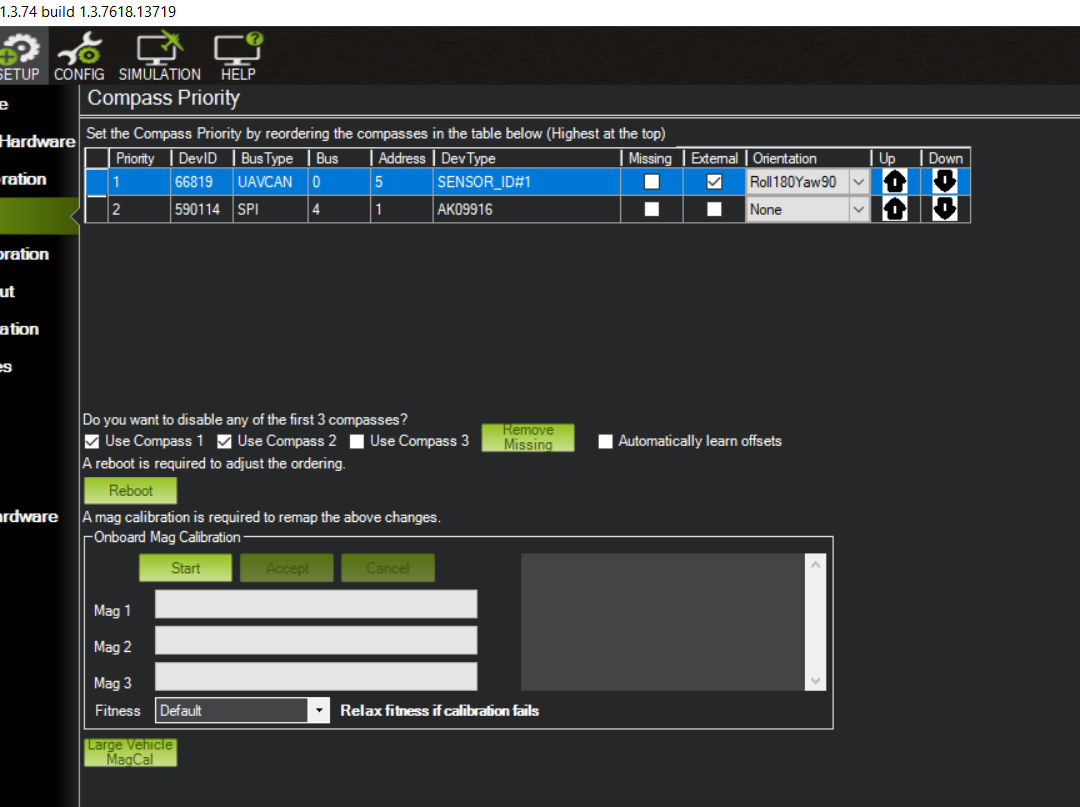
One thing was wrong though, the orientation was wrong. I needed to set COMPASS_ORIENT=10. I suspect mRo may have missed a patch for master for this GPS. I’ll check with them.
I mention this as you should check you have the right orientation.
Cheers, Tridge
My COMPASS_ORIENT was zero assuming orientation correction was made in the ap_periph firmware(if it’s a hardware offset on pcb)
With respect to mounting GPS itself, i don’t have any orientation correction required. I have attached a picture above on how it’s mounted.
Thanks for the help ![]()
Wait. Is this on ap_periph parameters or autopilot parameters?
I did that in ardupilot. The mag cal process will find it automatically, I’m just warning you that the master fw had the wrong orientation for the GPS firmware. I’ve opened a PR to fix it.
Apparently there were two hw revisions of the M10070. The early ones had a different orientation for the compass, and didn’t have the baro.
This PR fixes both those issues:
it fixes mag orientation, and adds in the baro.
I’ve merged that now, so the ‘latest’ fw for the M10070 will have the changes in a few hours.
Thank you so much!
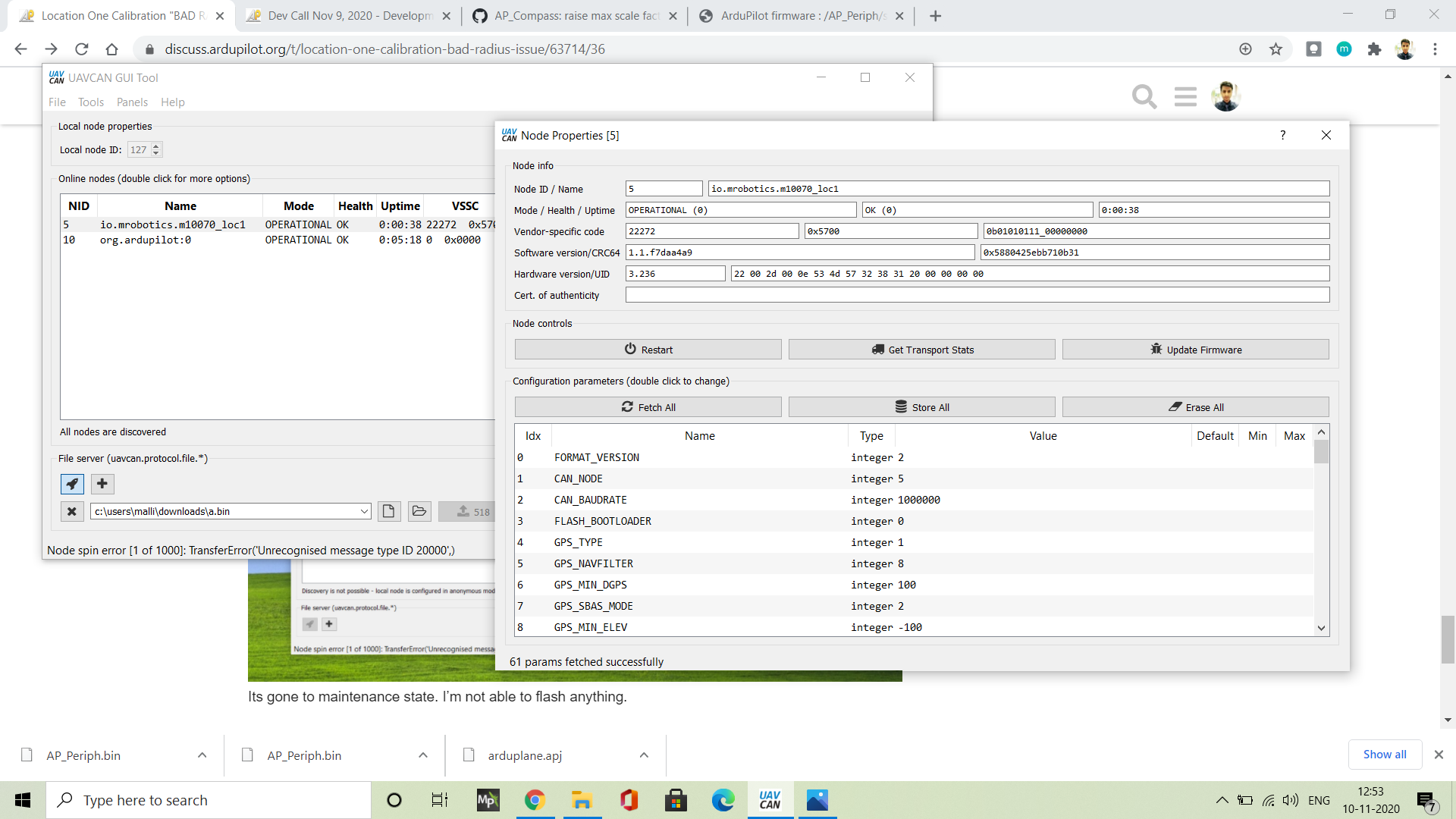
I was just wondering why would we need compass parameters on GPS firmware and Ardupilot firmware both. I feel on GPS firmware side it’s one time setup.
There’s COMPASS_AUTODEC again on GPS firmware. Won’t it conflict with ardupilot generated declination?
Just wondering, I haven’t gone through auto declination code.
you don’t need to change the parameters on the GPS from the defaults. The parameters are there as the GPS uses our AP_Compass library, but you can leave all the parameters as defaults
there is an alternative for update the firmware on can periphs… if you have a flight controller with an F7 mcu… with arduplane firmware and the correct settings you can use it as a dongle
odd. Please rename the new firmware to “a.bin” and try again. There have been issues with filenames longer than 5 chars in the update process.
Hey @tridge
Same with cube orange and renaming the file. I can access the params but flashing is stuck.
great. What scale factor did you get? Let me know when you’ve done a flight test and I can check the log if you like.