Hello guys!
I’m facing “Bad Radius” error on mRo Location One GPS running RM3100. The model number is M10070(version without Baro). I tried various MP versions and Ardupilot builds but couldn’t get it to work.
I also updated to latest stable AP_Periph. But same result.
In one of the logs below, I have attached here2 with Location one for reference. Here2 calibrates with auto orientation but RM3100 doesn’t.
Thank you!
Hey @rmackay9@Dave84
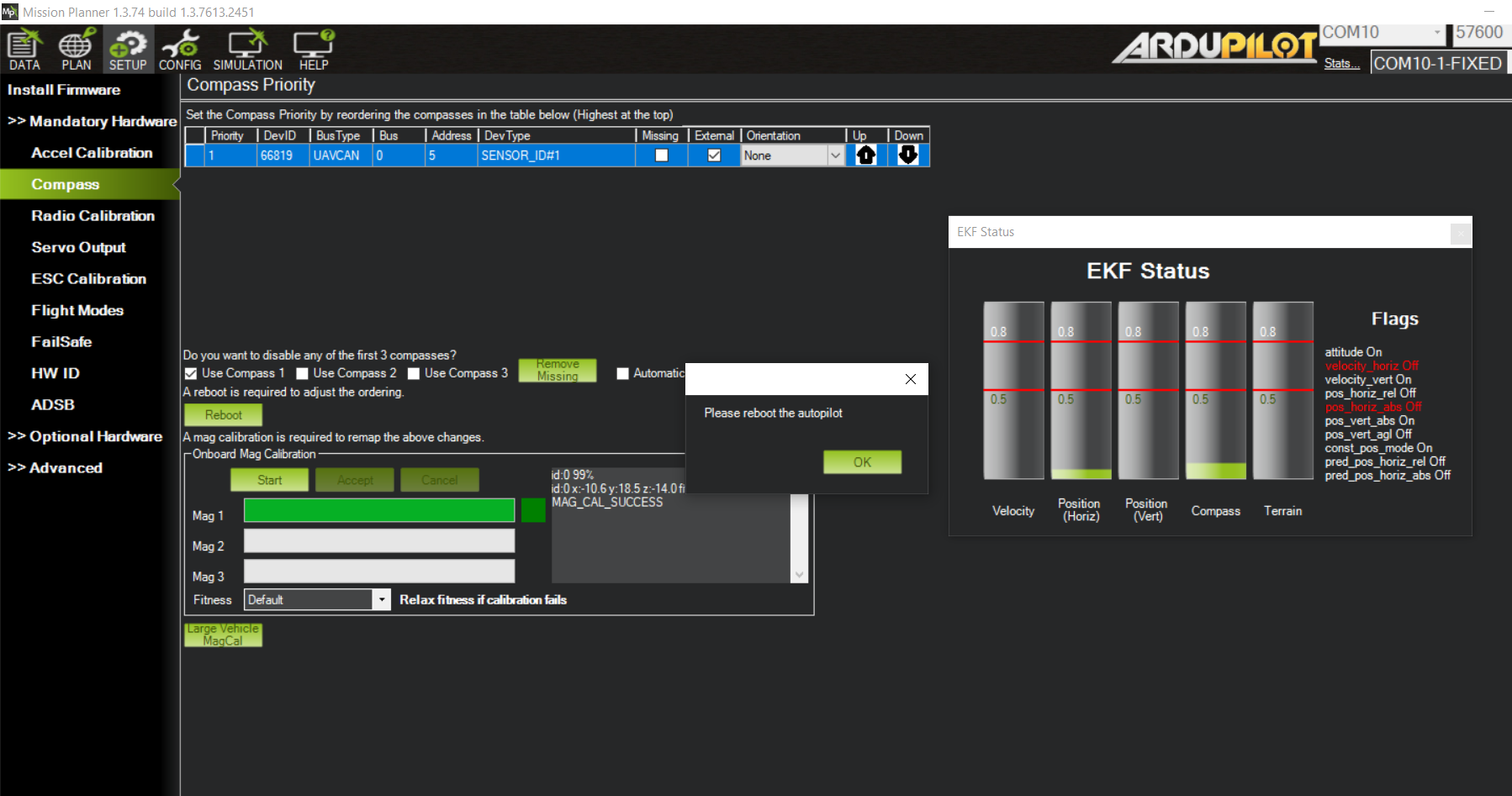
Okay. Tried very good number of calibrations with AP_Periph for M10070 latest firmware. It looked like compass calibration was very successful without GPS fix.
Once the GPS fix was established, the compass started to show “BAD Radius”. I thought it was something to do with COMPASS_AUTODEC. But even after disabling COMPASS_AUTODEC and redoing, the issue persists. https://drive.google.com/file/d/1pU8tPy_K1K5spdQBsBUbquejQXxWMXuo/view?usp=sharing
What I feel is, this has to do something with AP_Periph CAN packets(Just a thought). @pkocmoud, does location one do any correction wrt to GPS onboard?
Also, I don’t know why I’m the only with the issue.