Hi, my friend, I am building a Tarot hexacopter 680mm with littlebee 30a (complete setup: motor rc timer 360kv; pixhawk 2.1; dragonlink v2; rfd 900; littlebee 30a; turnigy 9x radio; propellers 1355; lipo 6s 5.5a 60c gens ace).
I updated the esc (one by one) using an arduino nano, for now I only changed the parameter “Low RPM Power Protect” (the warning of danger is scary …). I’ll change the direction of the engine and fly.
I did not have this strange noise in the engine. I will post my feedback here as soon as I start the test flights.
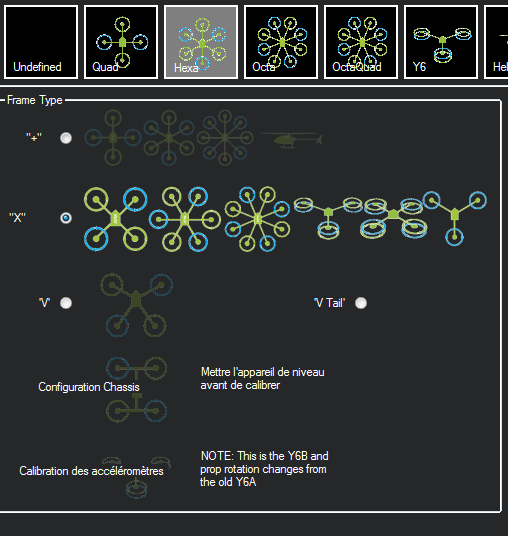
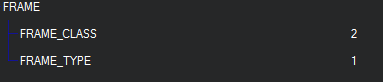
That’s correct. As it states on the MP Motor Test page “motors are tested in CW rotation starting with front right”. Front right on a Hex X is motor 5, then 1 and so on.
Your throttle channel low end point is too high. You need to lower the end point, re-calibrate the radio in Mission Planner and then re-calibrate the ESCs.
Reading thru this entire thread the problem seems to be this craft hasn’t left the ground yet. Why don’t you try that and if there is a problem post a flight log.