http://great3d.com/custom-carbon-fiber-cutting/
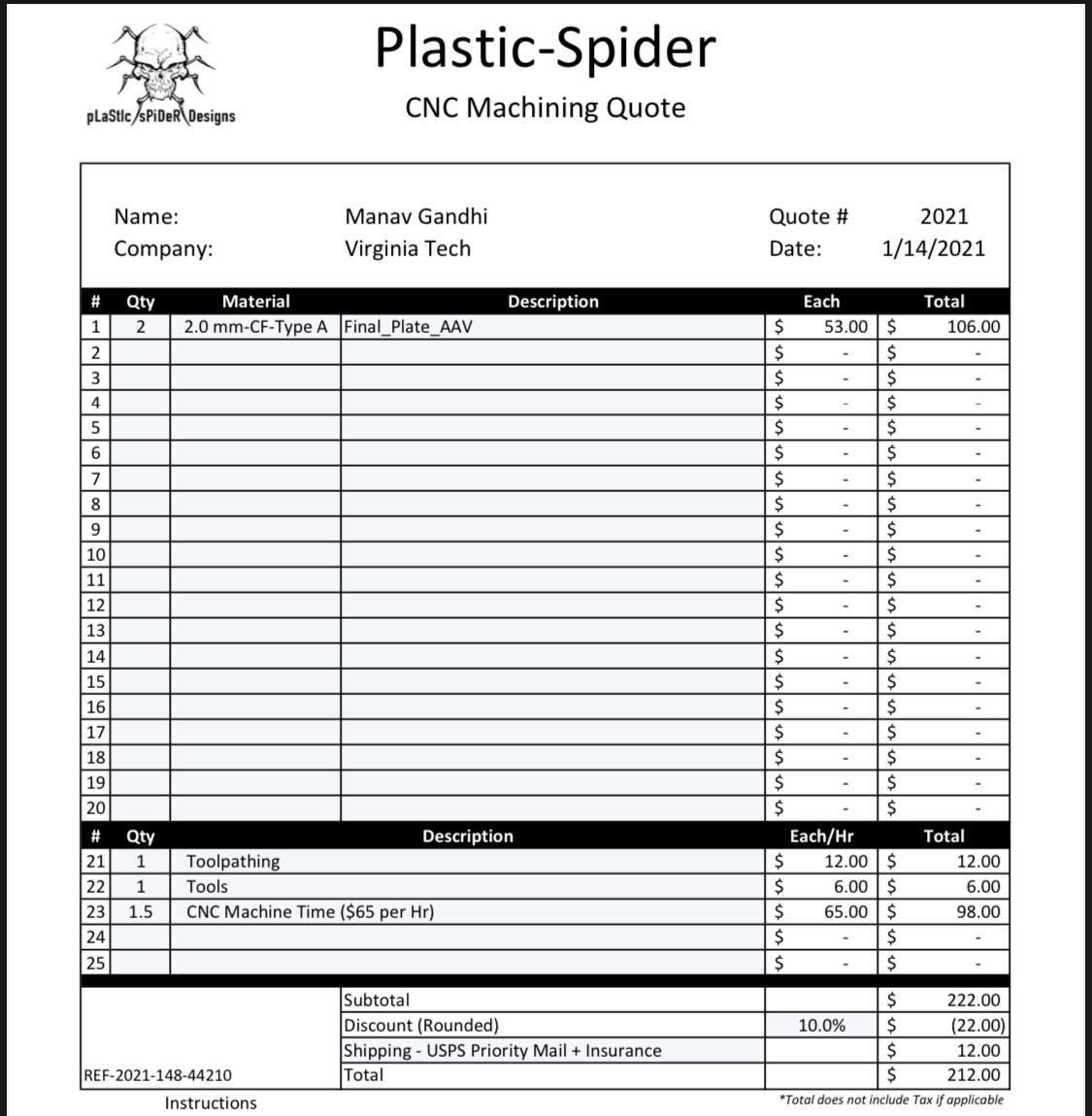
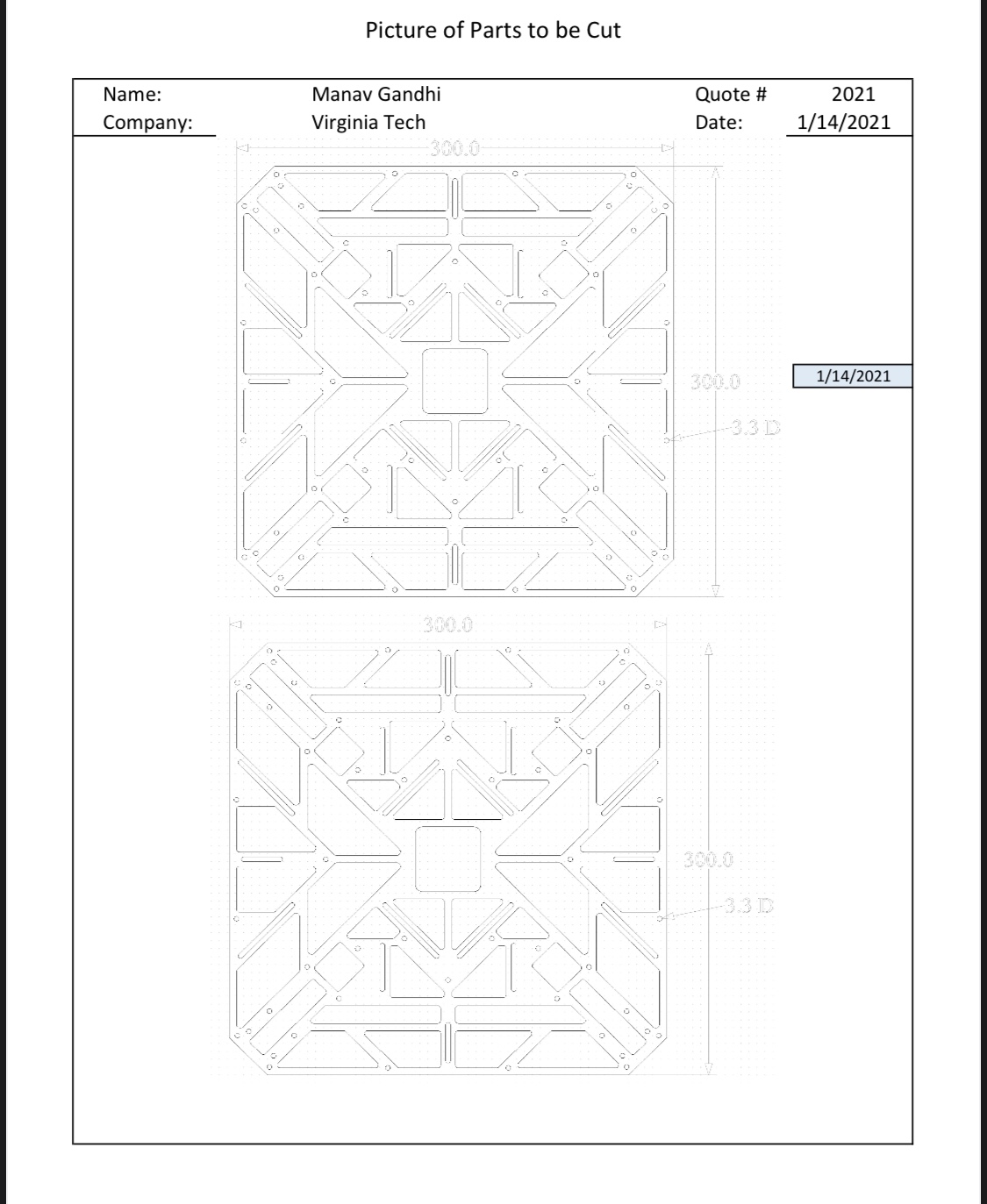
I get my CF plates cut from here. Quick delivery time (5-7 business days) and pretty inexpensive considering that they purchase the material, CNC, finish, and deliver.
http://great3d.com/custom-carbon-fiber-cutting/
I get my CF plates cut from here. Quick delivery time (5-7 business days) and pretty inexpensive considering that they purchase the material, CNC, finish, and deliver.
Where are they located?
North Carolina
Extra words to meet requirement…
thank you for the advice, i’ll take a closer look tomorrow… i am currently experimenting with different vibration damping setups (there is still hope deep inside me ![]() ) i’ll post the results later this week
) i’ll post the results later this week
hey dave
it seems like i am getting closer to damp out those vibrations…
may i ask you to take a closer look at HoverDampSideBig1.BIN? (2.bin is again after the notch filter)
i just compared the FFT and the Z-Axis without damping was almost 30, now it is 5
Yes, big improvement. The notch filter looks like it’s working well (in Damp2) but I would make some minor changes as follows:
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
Also just a final check what is the pole count of the motors you are using? It’s used for ESC referenced notch filter.
ok thanks, i’ll adjust that… The pole count is set to 14. according to the motor datasheet this should be fine.
not sure if i can test today, we have some snowfall at the moment…
OK, just checking. In one case this was overlooked on a big motor with more than 14 poles and it took a bit of sleuthing to figure out why the notch filter wasn’t doing a great job.
makes sense, can lead to endless struggle 
I think i should design a weather cover next so we can fly during snowfall 
the day is saved (or should i better say, the frame is saved? )
today we finally succeeded with the high speed tests. the perfect efficiency is at 16.7m/s but we did speeds up to 18.5m/s and vibrations stayed below 30. the Y axis vibrations increased now a little but i can live with that…
thank you so much for your help. i can’t wait to do long range 16.7m/s flights… 
the orange cube has not yet arrived, but i will comment here about the difference.
Ok guys i would like to come to a conclusion
the Notch filter in combination with the Vibration dampening works pretty well, as long as the Airspeed does not get above 18m/s. we have a target speed of 16m/s and i will add a HereFlow to it to monitor the Airspeed…
I also made a cover over the Pixhawk to make sure it is protected from turbulence.
Thank you for your support here. i have learned a lot about Ardupilot and already started the next project
Make sure those wires are not touching the Cube too. The GPS wires are always a hassle - the outer covering makes them too stiff and you have to carefully strip back about an inch or two of the outer covering.
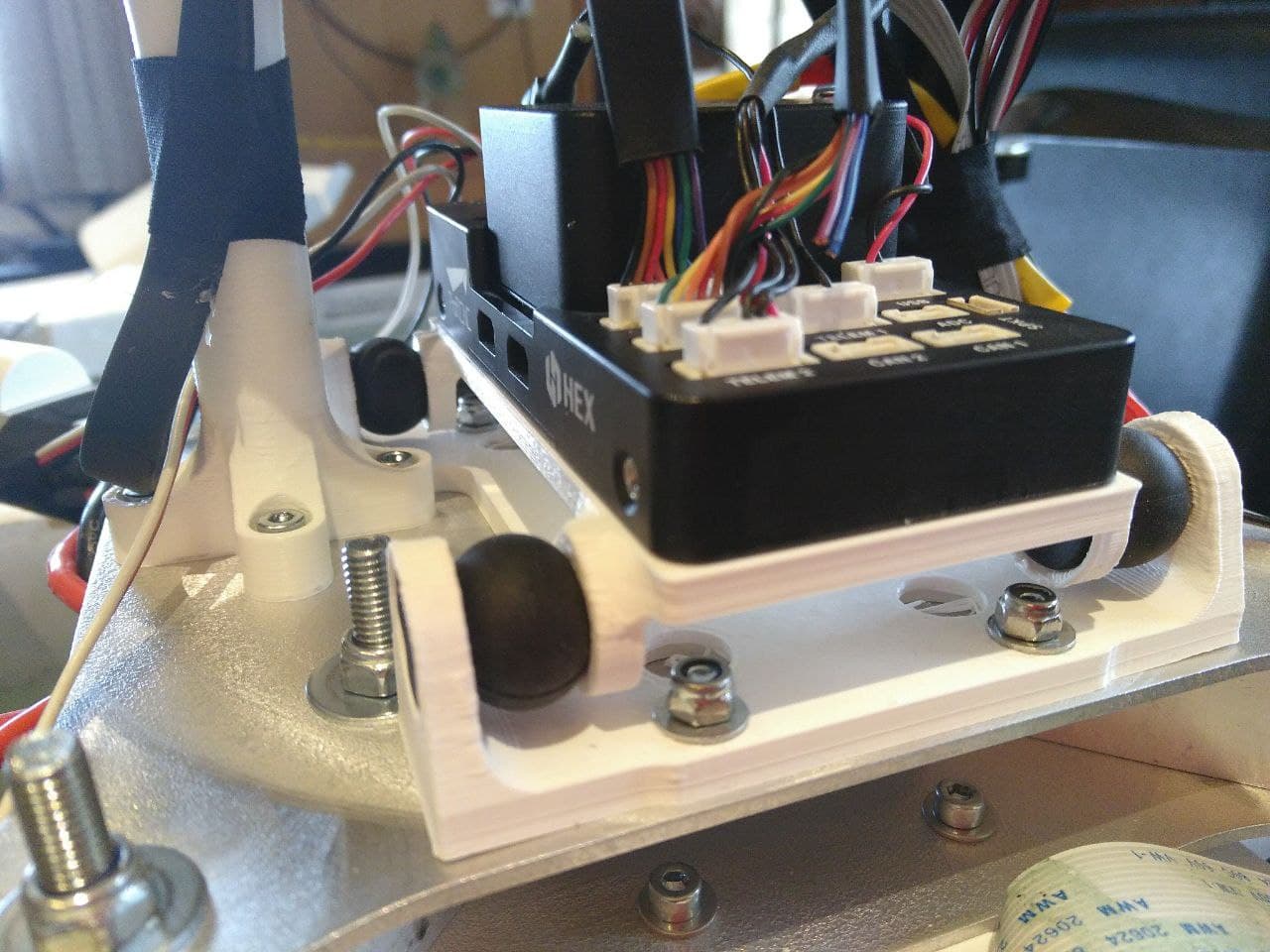
Also judging by the construction of your anti-vibration mount it will have different damping properties in each of X, Y and Z axis.
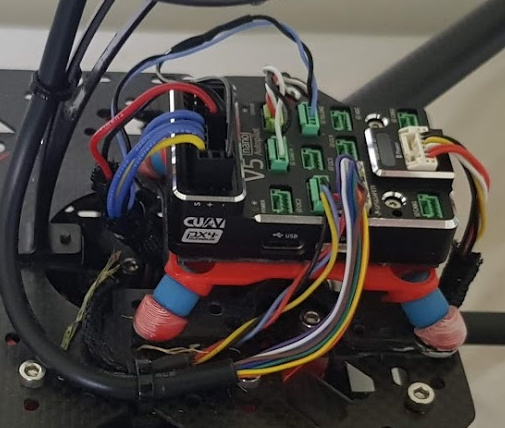
You could try something like this where the balls are angled to give approximately equal damping in all directions. This one even takes into account the rotation of the Cube and centres the IMUs in the mount.
A different flight controller shown here but you see what I mean, wiring is all fastened to the frame with just enough length and flex so they don’t interfere with the FC. Now to put a canopy over it…
The grass debri is optional ![]()
Thanks, this kind of vibration dampening design is well known, we did some tests with it but on this frame the biggest issue have been the Z-axis vibration. The design we use now damps the Y and Z more than Y and seems to be suitable. Like mentioned before by dave, every frame is different and might have different vibrations.
I zip tied the gps wires to the mast so they go straight to the connector without touching the fc. The tip about striping the wires is well noted, thanks for that
Granted - and bonus points for testing!
What’s the use case for that sensor?
that i was a idiot thinking Flow stands for Air flow 
Ah, well… Copter doesn’t currently support an Airspeed Sensor anyway. There was a PR in the works to do it but it appears to be stalled out. The only option is Ground Speed from GPS.
that would lead back to the initial question about limiting the wind fight…
maybe i can limit the max pitch? but might not be helpful for speeding up huh?
Right, direct correlation.