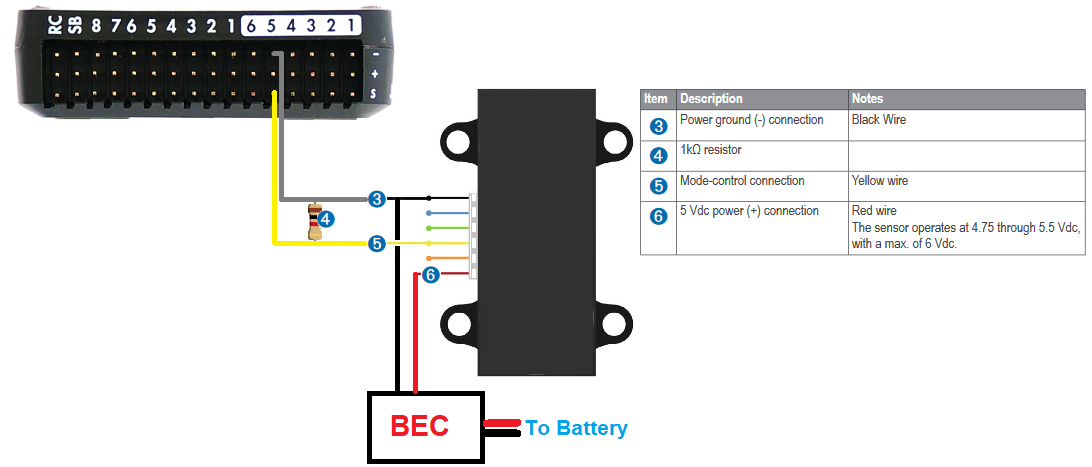
[RNGFND1_PIN] = 54 “AUX5” (if using 4.0.0 or higher any Auxiliary output may be used)
[RNGFND1_MAX_CM] = 3500
[RNGFND1_MIN_CM] = 20
[RNGFND1_SCALING] = 1
[RNGFND1_OFFSET] = 0
[BRD_PWM_COUNT] = 4
And I am getting no readouts in Mission Planner for the LIDAR. Is there anyone out there that has done this and can help? What am I doing wrong?
I have heard I need different drivers? Sorry I am new to this but happy to give any/all info that you may need to help solve this problem. Any help is much appreciated.
I have an oscilloscope probe connected between Power Ground and the Mode Control connection and we see plenty of pulses. The pulse widths change when you put your hand over the LIDAR and raise your hand. Based on this I would suspect the LIDAR is functioning. The pulses have been observed all the way to the AUX 5 pin.
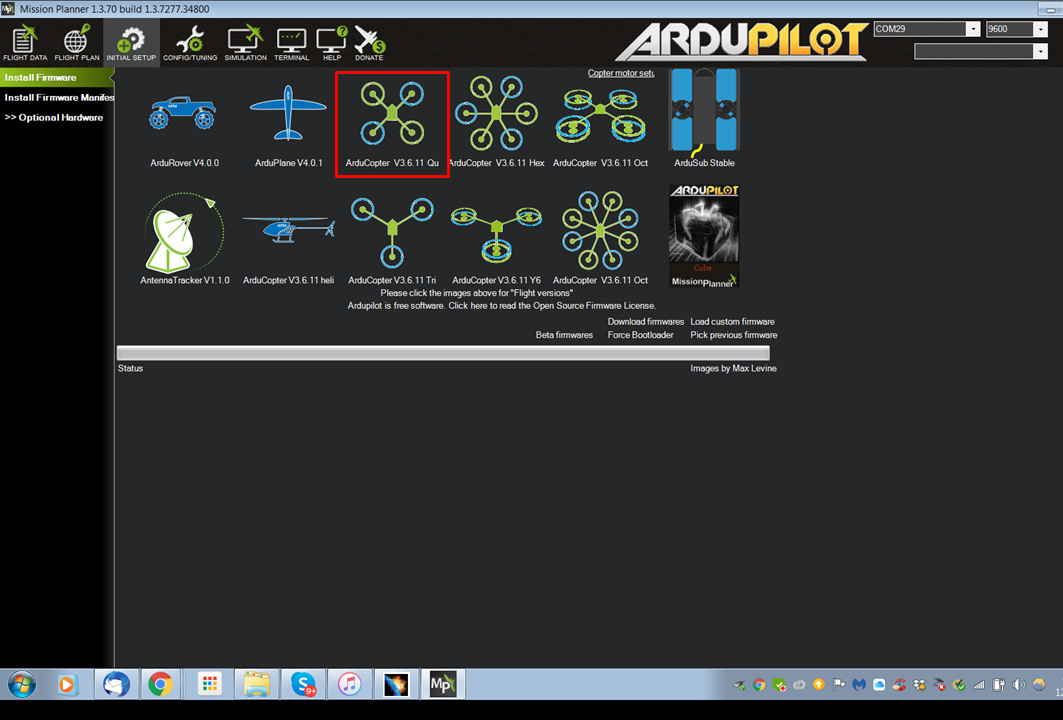
It seems to me, for lack of better terms, that the pixhawk doesn’t know what to do with this signal - aka - unsupported firmware.
Steve
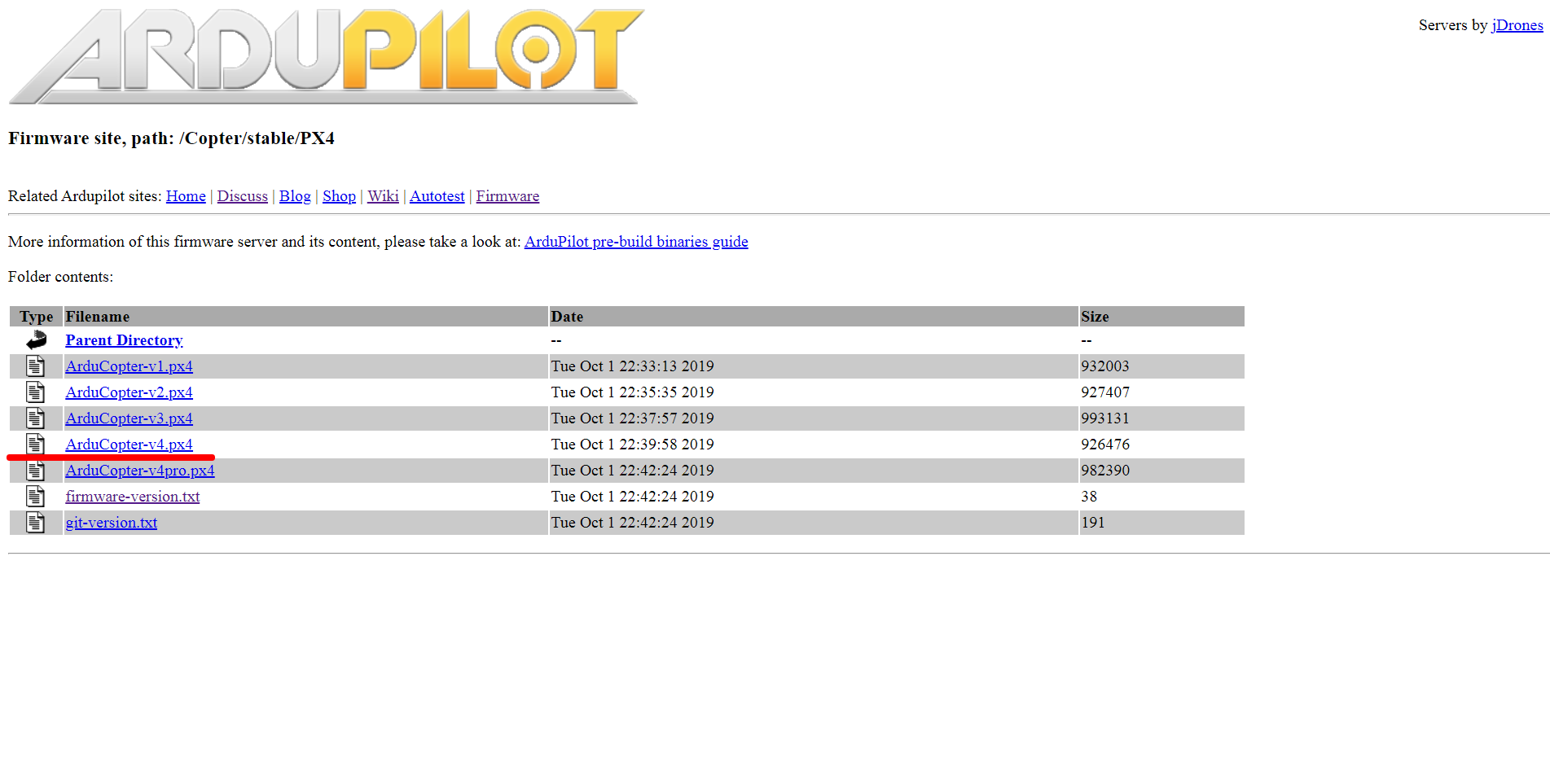
@ppoirier@Matt_C Hey this is random but are either of you available for a 5-10 min screenshare? I’d be happy to pay for your time. You guys have been very helpful so far but I’m still confused on what “v4” is and also I’m thinking a quick 5-10 min screenshare with your guidance as I hit these roadblocks would be ideal. Just throwing it out there.