Hi all,
I have been running some precision landing tests with the irlock system.
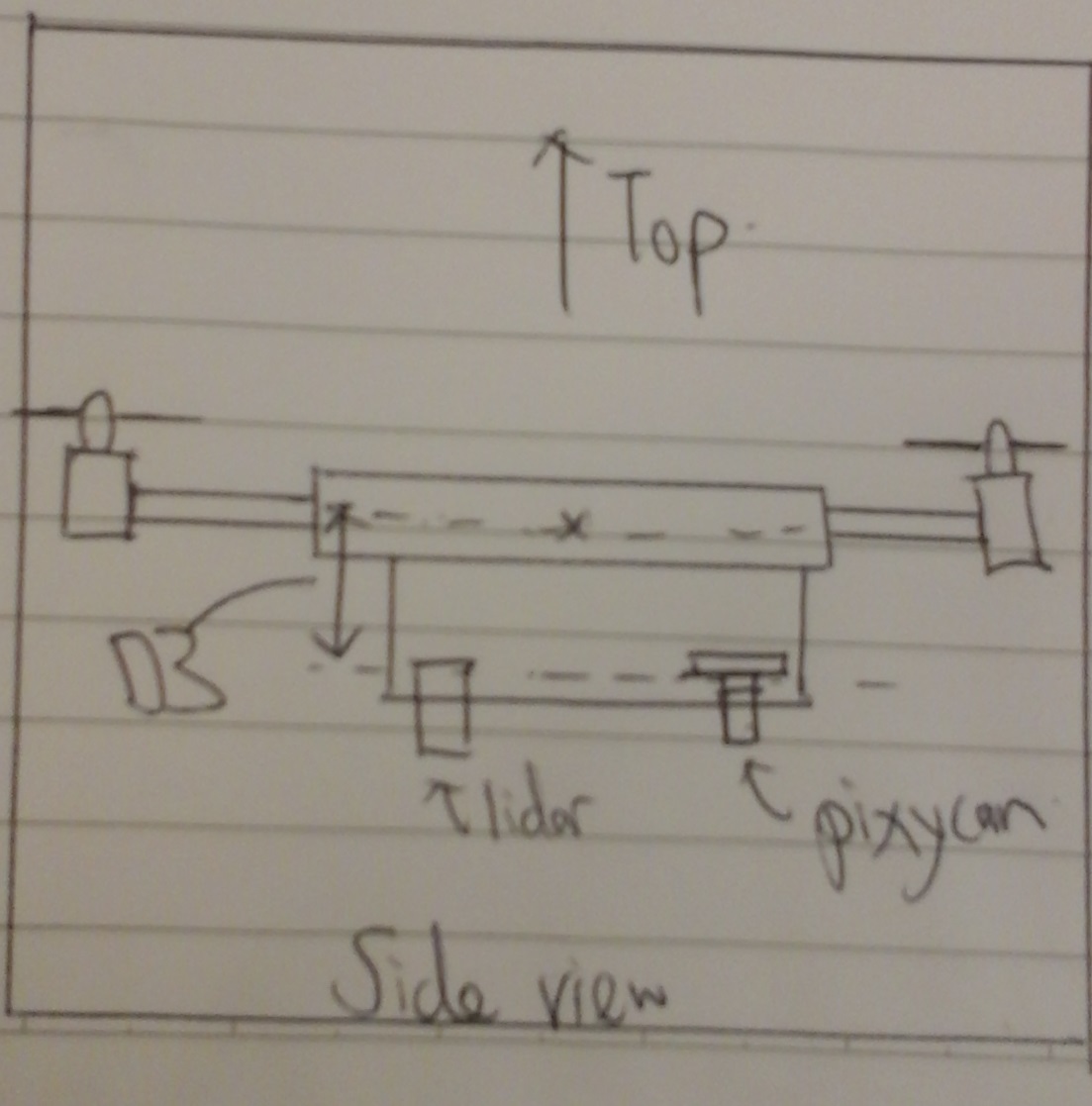
Because of various considerations, the downwards facing Pixycam and lidar cannot be mounted at the center of the drone.
Assuming the vehicle is pointing in the correct direction, I would need to offset the placement of ir beacon on the target for the vehicle to land at the centre of the target. I would like to be able to place the beacon at the centre of the target and have the vehicle land with its centre over the beacon despite the offset of the sensors.
I came across these PLND parameter:
PLND_LAND_OFS_X, PLND_LAND_OFS_Y, and PLND_LAND_OFS_Z
PLND_CAM_POS_X, PLND_CAM_POS_Y, and PLND_CAM_POS_Z
Are these the parameters which I can use to compensate for the positional offset?Assuming the placement of the sensors are as such:
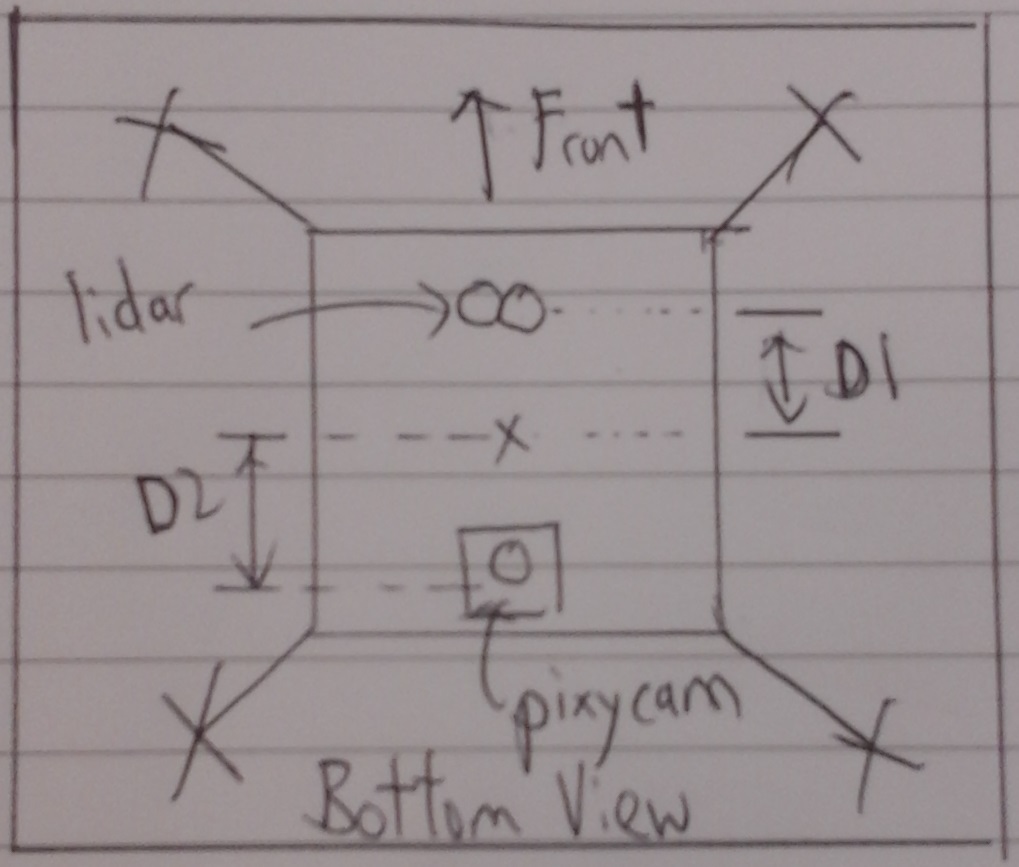
What are the values I should set for the above 6 parameters? I assume these values are defined with respect to the vehicle frame and not the frame of the flight controller. In such a case what is the z direction origin for a multicopter?
There are similar parameters for the lidar.
RNGFND1_POS_X, RNGFND1_POS_Y, and RNGFND1_POS_Z
I am just wondering whether these parameters are being use in the compensation for the height reading.
Thank you.