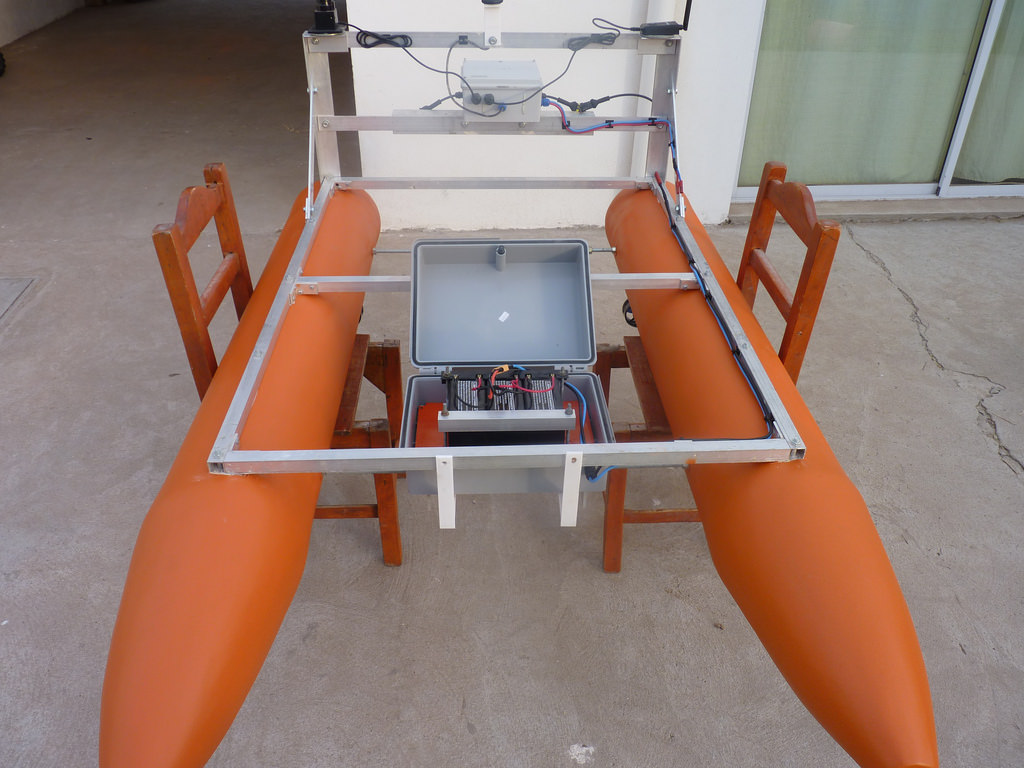
This video of a successful autonomous mission from Leonardo who has been active in the Rover-3.2 forums testing his research boat. This is a skid-steering vehicle with a Pixhawk1 in a water-proof box.
In addition there’s a Lidar (270degree Hokuyo?) connected to a companion computer which Leonardo intends to use with ROS.
Congrats and thanks Leonardo for your efforts with Rover/Boat and sharing your success!
Pictures below show some additional views of the vehicle.