I have a large X8 running T-motor U8 170Kv motors (28x9.2 props). Current take off weight around 13Kg hovering at around 40% throttle
Frame is not as stiff as you’d like!
Aircraft took off and hovered nice enough on default tune. Flew forward gently and as I stopped the aircraft it gently rolled over to the right and ended up upside down before it hit the floor.
The vibrations are high on this machine so that may have contributed to the crash. What id like to understand is exactly what chain of events has caused the aircraft to crash so I can learn from mistakes for next time.
Can anyone take a look at this log and explain the steps that lead up to the premature termination of the flight? I’m sure there’s something I can learn from this.
Your copter is over-propped and under-volted.
I personally tested U8s on 6S down to 22 inch props and they’re still laggy and copter is prone to oscillations. Plus most ESCs struggle to keep in synch such high pole count motors.
On 12S they run OK-ish if paired with a capable ESC. I’ve tried Alpha 60A HV (reprogrammed for U8 using Alpha programming kit). I’ve also tried APD X-class 100A ESCs, but these won’t take regular PWM as input, and the Black Cube can’t output a clean DShot300 signal on its AUX ports.
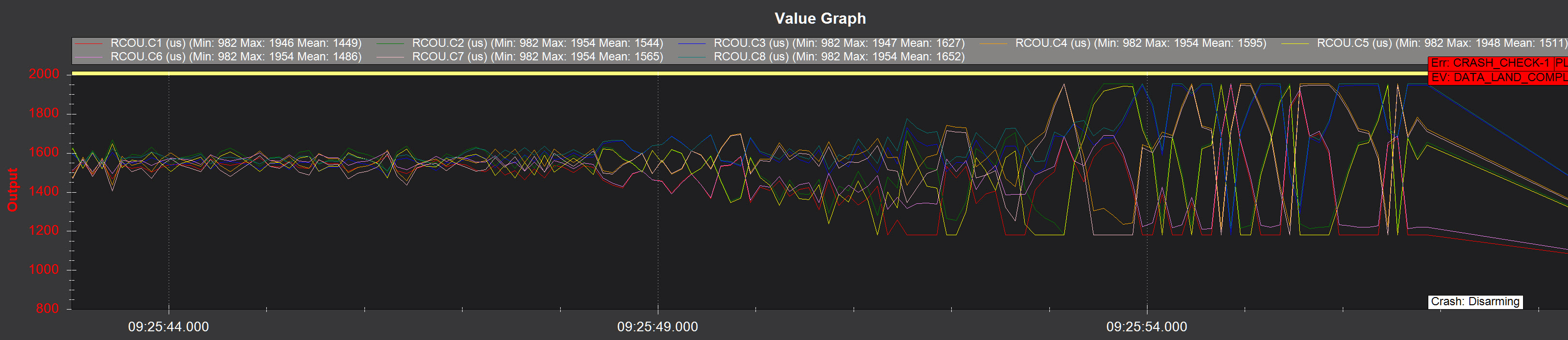
it looks to me your motors are trying to compensate for something about 9:25:47…then something comes loose because it just gets worse from there on…i think maybe one of your motor mounts slipped sideways on the arm (if its possible for them to rotate, meaning no center bolt thru arm)…or a motor or prop came loose