I’ve been flying my quad for some time without major issues, but I still can’t explain this issue I had some time ago. My quad was flying in AUTO, I changed it to GUIDED mode to pause it, and then I changed it back to AUTO, but it was really close to the target waypoint. It stopped at the waypoint and as it was changing heading, the copter crashed unexpectedly.
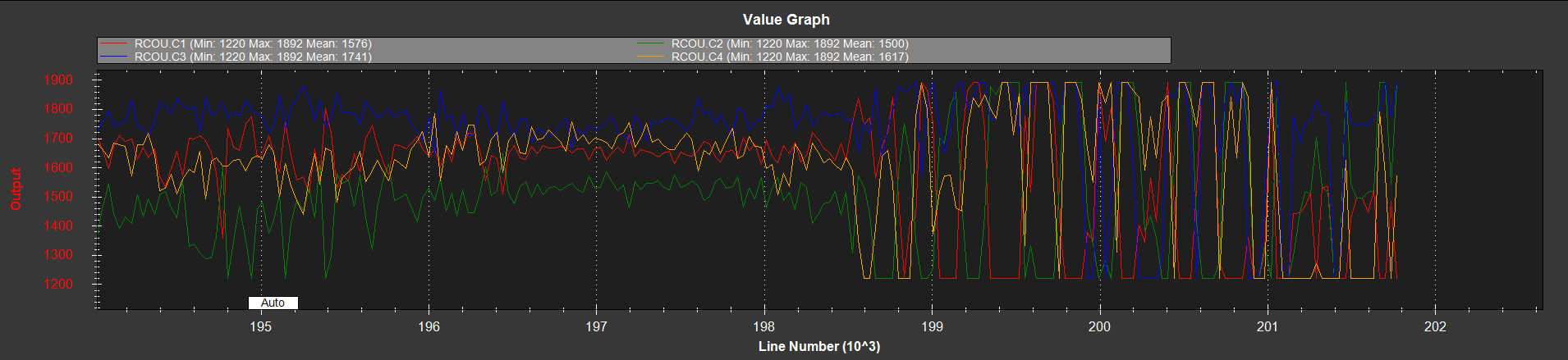
First I thought it was a motor or ESC, since my PWM outputs were saturating low and high around the time it crashed.
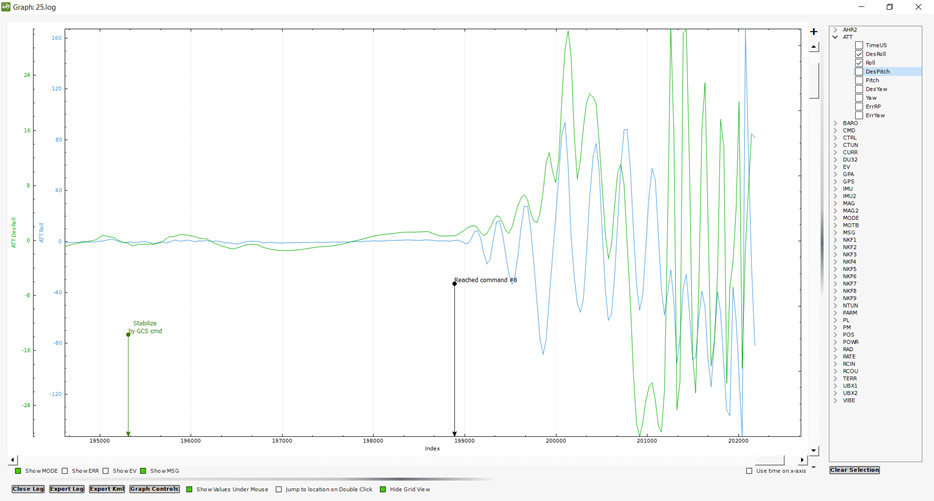
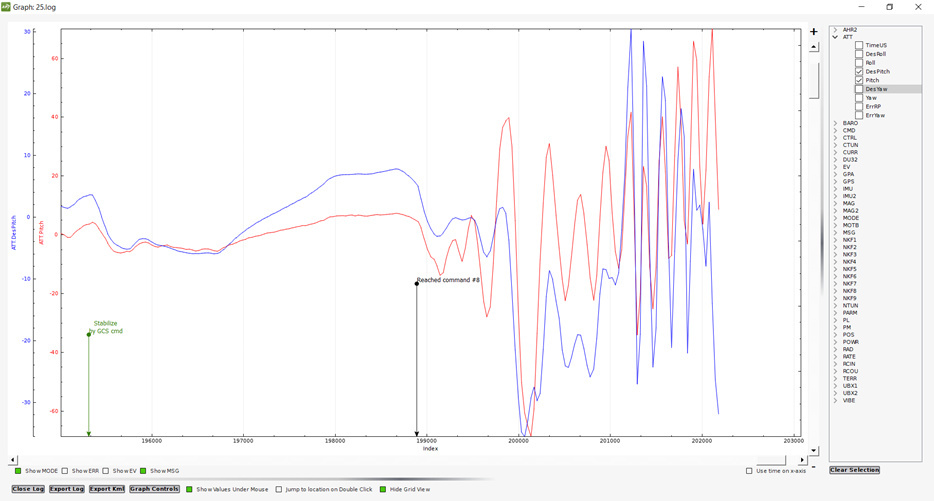
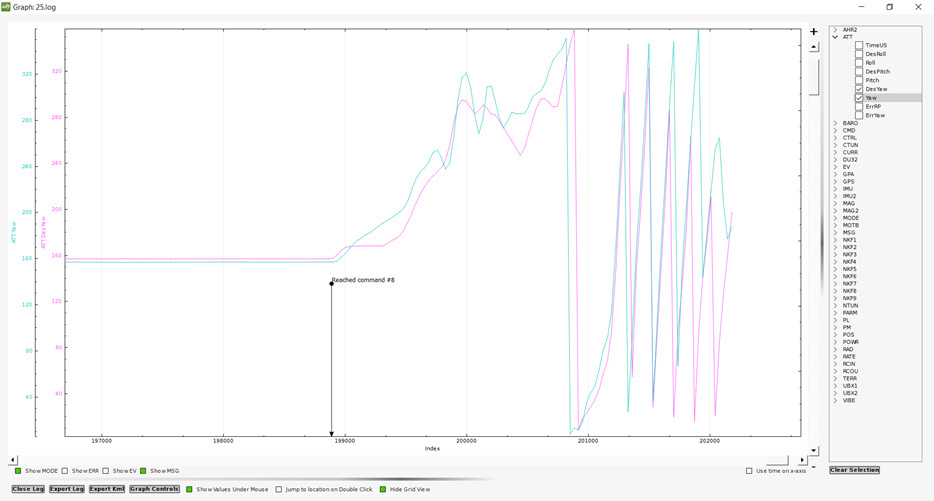
But then I saw the Roll vs DesRoll, Pitch vs DesPitch and Yaw vs DesYaw and I don’t think its a mechanical problem. As you can see, these parameters are trying to follow the ones set by the autopilot.
According to the documentation, if it was a mechanical problem, Roll wouldn’t follow DesRoll and so on, right?
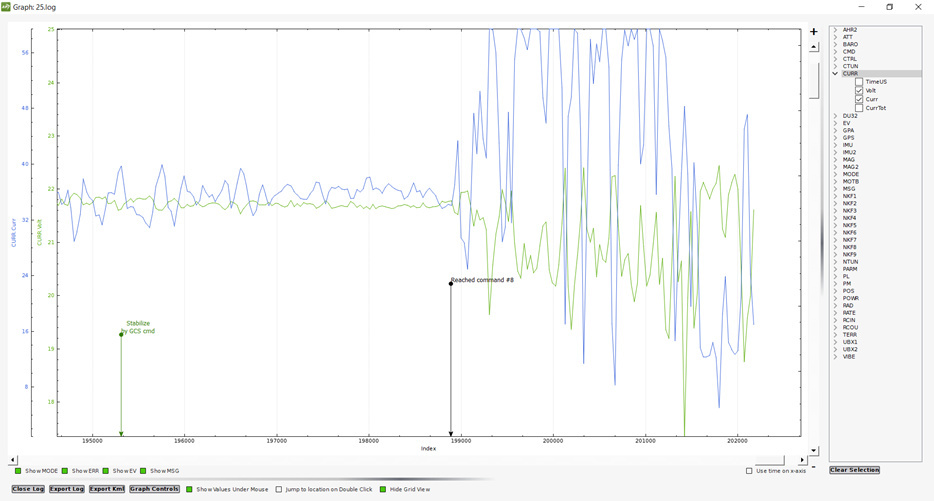
I also had a peak in current around that time, which made my voltage go really low (19 V for a 6S LiPo). I guess that could be the cause of that weird motor outputs (maybe the voltage was so low some ESCs couldn’t drive their motor?). Could you please check the log and confirm this or if maybe you see another issue?
After a couple of weeks, this happened to me again. Could you please check my logs? I have attached a document which shows some similarities before the crash, but otherwise I have no clue of what is happening. I’m really worried since I’ve lost all of my motors and my LiPo batteries exploded because of the crash (I was flying at 50 m). I don’t know what to correct for future flights.
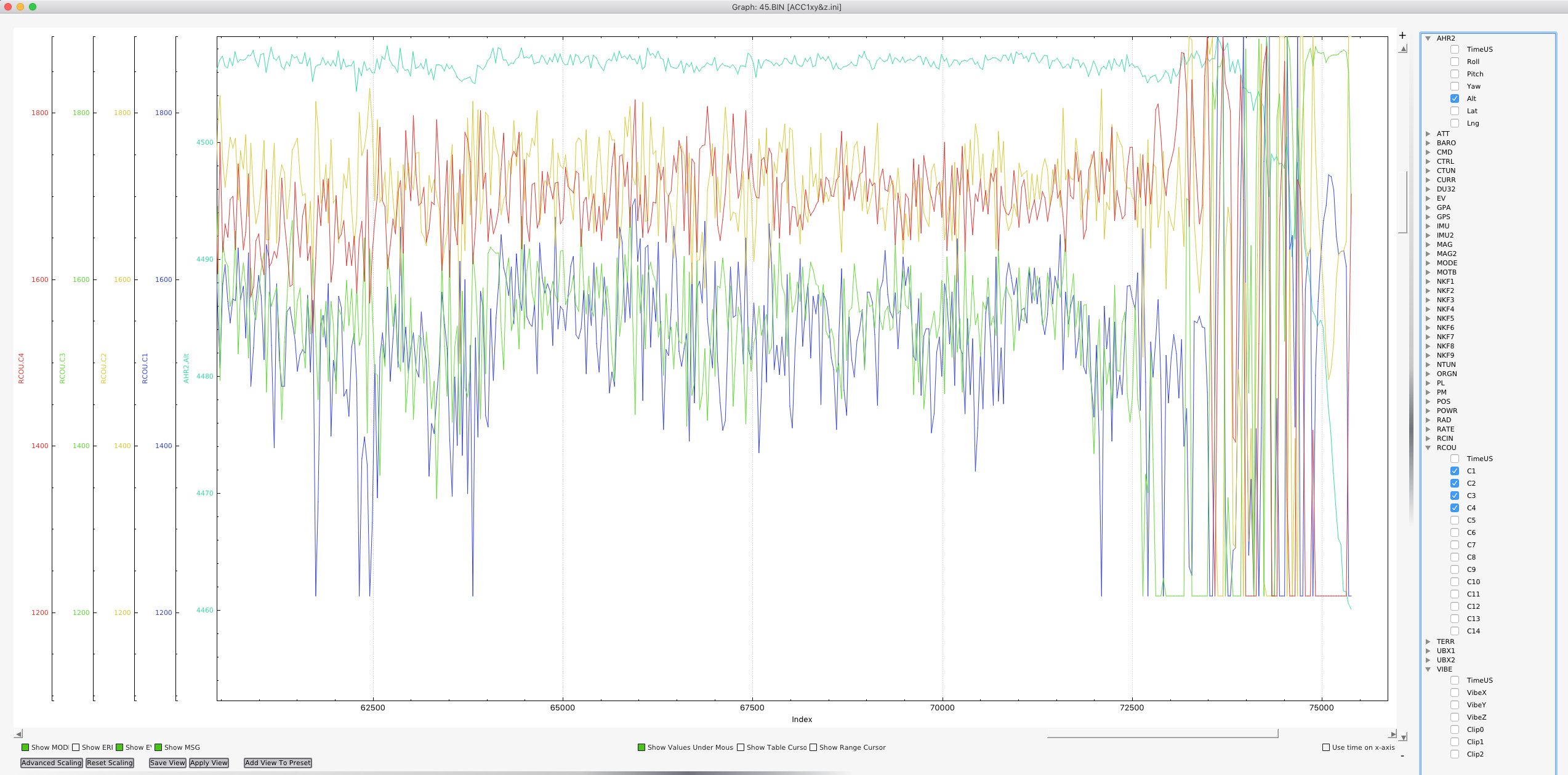
I just gave your log a quick look and what jumped out at me was the imbalance in motor outputs.
Your quad seems tail heavy with the rear motors, 2 and 4, working near max output for most of the time (I assume X configuration).
Towards the end of the flight this separation gets worse.
Could something have shifted?
The motors being maxed doesn’t leave any margin for stabilisation if anything overly disturbs the quad.
I had 3 flights before that one the same day (45.log) and the copter was fine. I personally checked the balance of the frame before that flight, according to our preflight checklist. It seemed ok, so I wonder if anything else could be the cause for this imbalance. I’m attaching the log of the previous flight (which was 2 hours before) which doesn’t show this behavior (at least it’s not that clear there).
Anyway, thanks a lot, it’s something I’ll take into account just in case.
In the screenshots at the top of this post the motors saturate/bottom out before the oscillations start. In log 25 motor 2 reaches the bottom signal first. In log 45 motor 3 bottoms out first and then oscillations start.
I’ve noticed your thrust at hover is 0.275 (MOT_THST_HOVER) which is rather low. Maybe your copter is just overpowered? I don’t have experience with overpowered copters but I fly a copter that is a bit under-powered and I’ve had the opposite problem with motors saturating, followed by oscillations and then crash. I found these kind of issues difficult to diagnose with the logs. In my case it was an issue with the down-wash from the back propellers interfering with the front propellers (I was using a weird experimental frame).
In your case it It could be an issue with the motors or ESCs or even one of the propellers slipping… Could be a sudden gust of wind that throws the copter off balance too.
That doesn’t solve your issue but at least that might give you a couple of pointers.
Cheers,