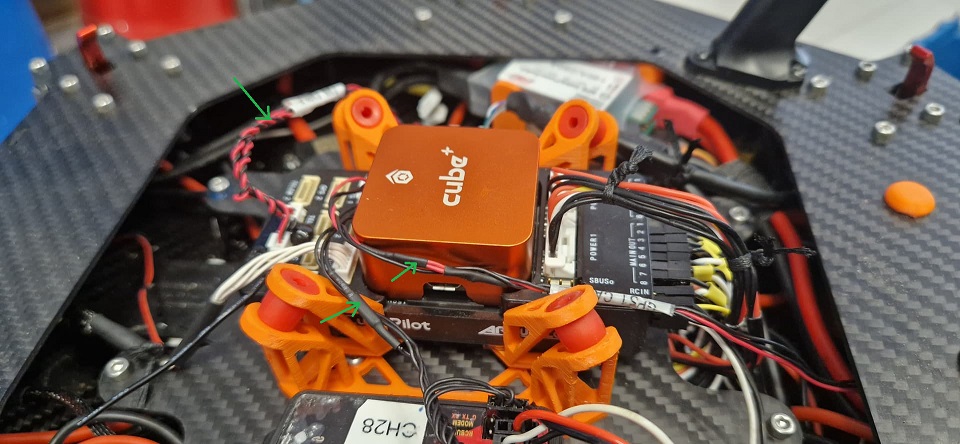
I feel these 3 wires are potentially the cause, hitting the cube+ and anti-vibration stand.
Alternatively, you could cut a bigger FCU plate and place it on top, a bit further away from the PDB mounting. Consider printing a cover to reduce vibration induced by propeller wash, it helps. It also helps mitigate atmospheric drastic change to the barometer. Example.
