yes, we are working on it. mounting the autopilot on thicker carbon plate more rigid.
the question its about pid tuning if these tuning is good enough to make a safe autotune.
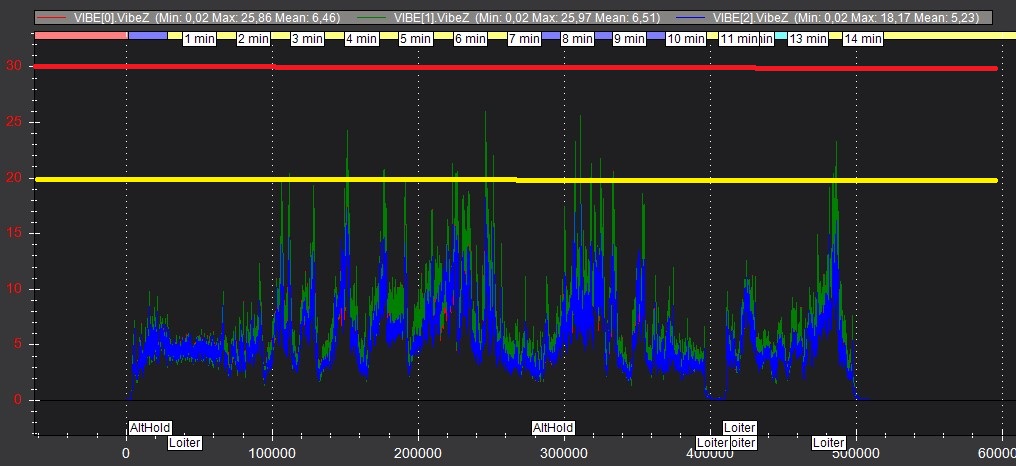
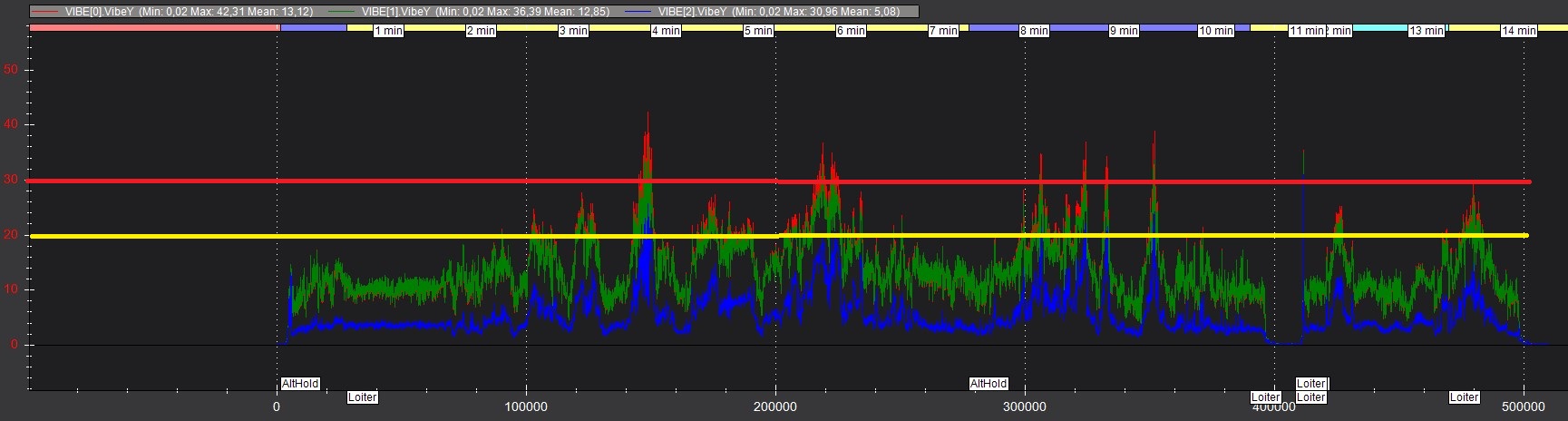
pictures of Y and Z vibe axis with the damper mount for FC.
how we can improve the Y vibes?
with these mount, we have noticed that the current pid tuning are less accurate, must be done some pid tuning to improve the overall tuning of the craft
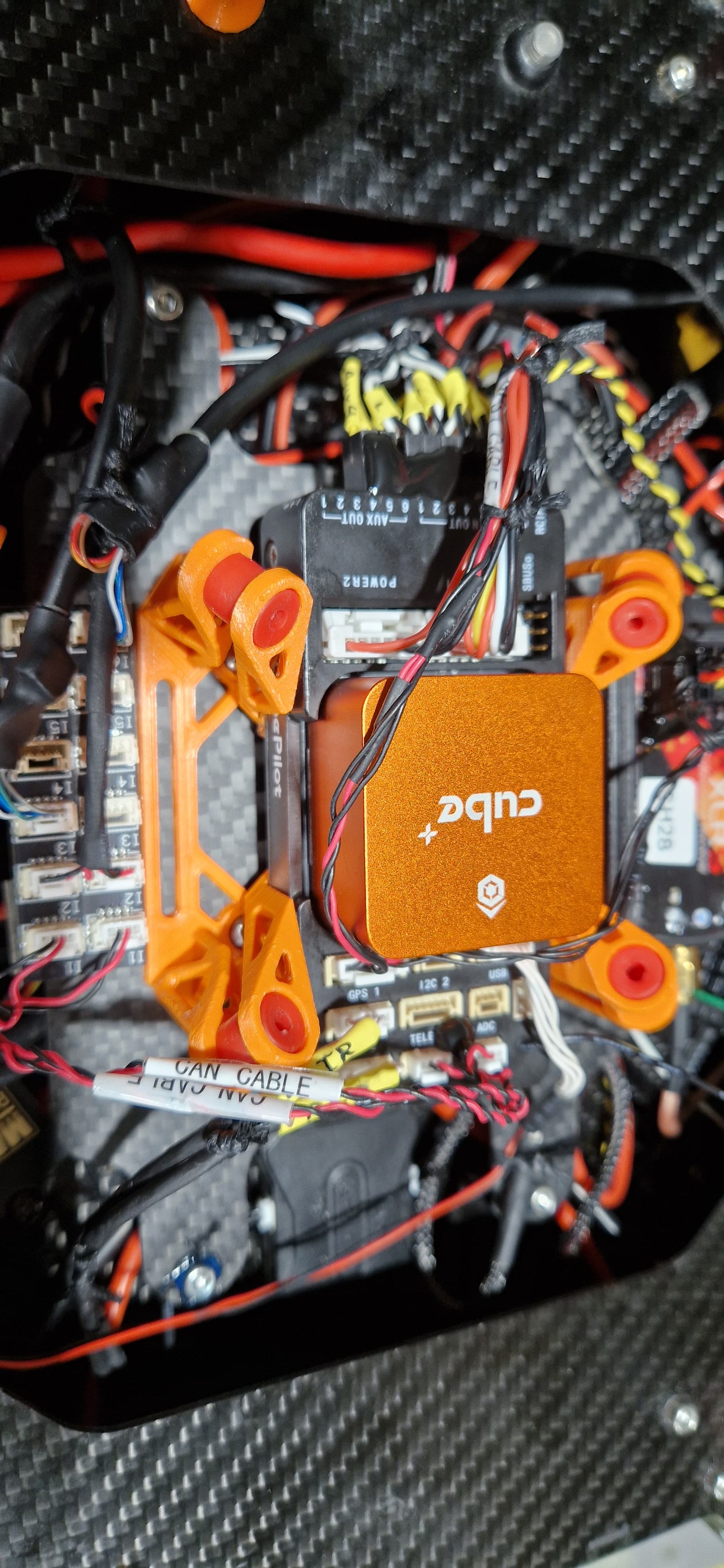
I agree it’s probably the wiring, especially all those Servo wires in a bunch. They need to be quite flexible near the flight controller and secured to the frame (or base plate) so you dont have the weight of all the wires pulling on the FC.
For T-Motor Alpha ESCs you need these:
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
and retest for
MOT_SPIN_ARM
MOT_SPIN_MIN
You might need to increase expo to 0.6, but more flights will tell.
Have you loosened cables more ?. Maybe you could share a new photo and we see something you don’t.
Zipping cables close to pins creates more tension. The problem is probably still about cable tension and something holding the damper.
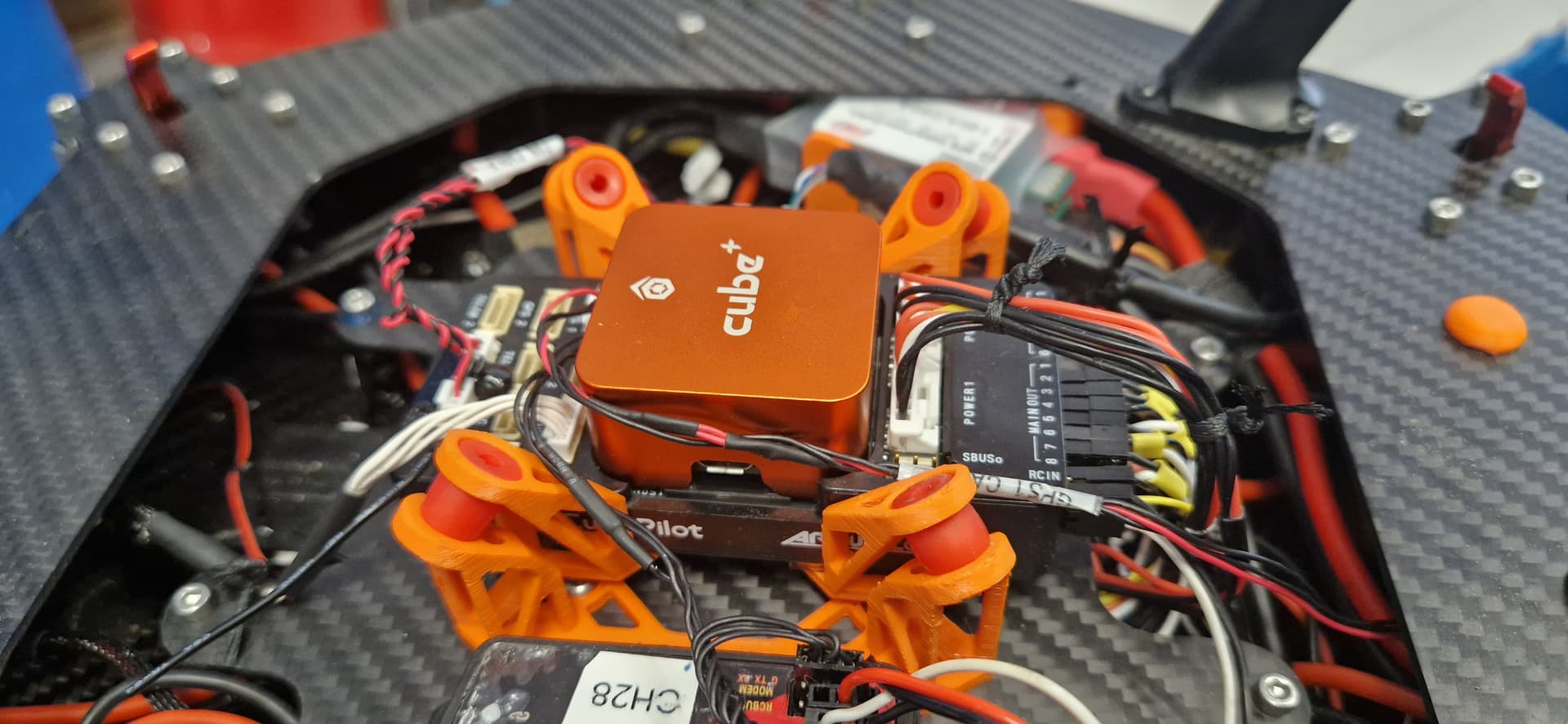
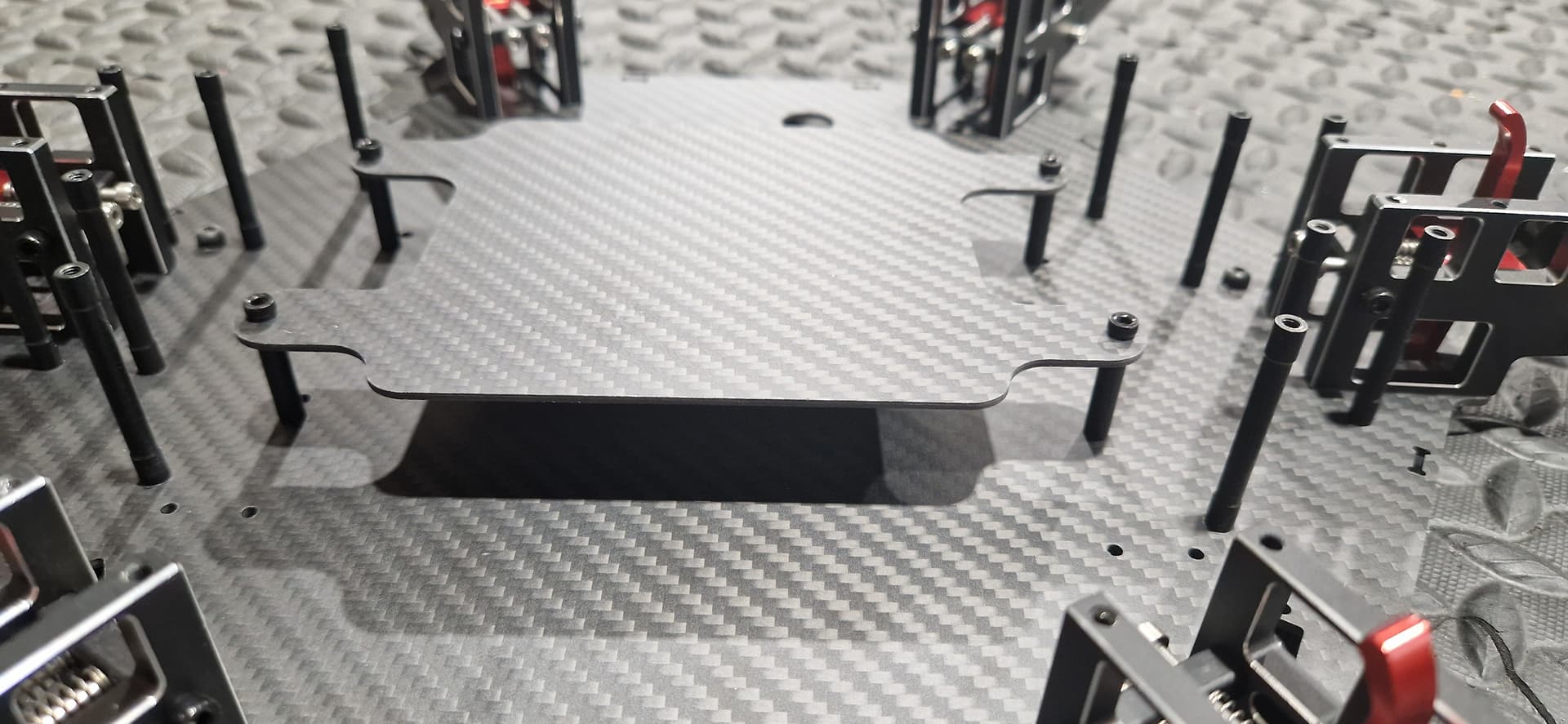
our issue maybe came from the carbon plate under the cube, its a carbon plane attached on main frame with 4 alu spacers
we suspect that this plate could amplify the vibes on the frame. we will machine a new carbon plate more thick to test it.
No doubt that is contributing to the problem. It’s too thin and poorly supported. Why use it? A large X8 I worked on had a PDB plate like that. The solution was to get rid of it.