Hi All,
I’m in the middle of tuning a large hexa for long range flight. (1600mm diameter, U8II/KV85 and CF28/8 props,22Ah/12C with 4kg payload). As always i’m trying to get a stable enough flight for autotune. Which more/less works with althold, but in loiter it starts to oscillate on both roll and pitch. With some tweaking of the PSC_VELXY parameters it is getting better, but still not stable enough for my taste to do an autotune.
First I subjected the payload which has a quite low CG so it can induce a pendulum effect, but that should manifest in AltHold mode as well. I have a bad feeling about tweaking PSC_VELXY is only masks some deeper issue, so I’m looking for an expert second opinion. Log is included with a number of short tests, look at the last althold and the loiter right after it. That was with the original PSC_ parameters, the last loiter was with halved VELXY_P and I.
(My concern is that I neved had to touch PSC values before, not even with a same sized copter)
@Leonardthall I know you are extremly busy, but a quick look would be really appreciated…
It does seem to me that actual roll/pitch overshoots wildly around desired values even in AltHold mode, which looks like basic PID tuning issues to me? I’d try halving ATC_RAT_ values in this case.
EDIT: I just realized Desired values is in deg not deg/s and AltHold is a self-level mode. So maybe ATC_ANG_ values also need to be looked into?
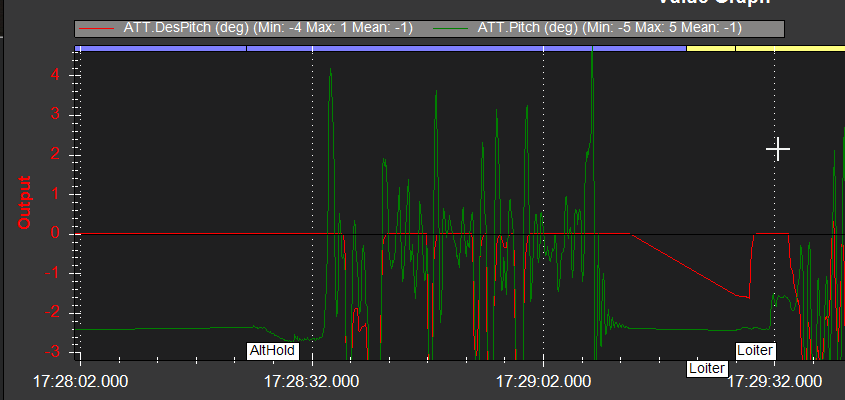
AltHold mode overshoots were known, since the copter was before tuning.
I went ahead and lowered PSC_ values to a level where the oscillation in loiter/poshold where not amplified, but kept in control. Then managed to do a successful autotune. Now in Althold the copter is locked in, and only PSC need some more tuning.
It seems the problem was the relatively small fuselage with long arms, strong motors, plus a payload extended below the copter, acting like a pendulum.
Learning; if the log says your PSC needs tuning then it needs tuning 
Glad you got it working! You mentioned your craft has a significant underslung payload - could it be that your FC is off-CG and causing IMU to pick up rotation as acceleration? It might be the cause that loiter performed worse and the need to relax acceleration regulation.
Hello Andras, could you provide once a picture of that copter. Looks quite interesting from your description.
Thanks
Harald