Hi @Yuri_Rage
Two HerePro GNSS used for Moving base line(GPS for YAW).
No compass enabled on HEREPRO as well as Cube Orange+.
Purely heading based on GPS only EK3_SRC1_YAW = 2 (GPS).
two HerePro seperated by 0.52m in Y axis.
when Hovering the drone EKF/Compass is normal when Maneuvering the drone especially when changing the heading in Manual as well auto mode i can see large Magnetic innovation change it goes almost 0.8 (Red indications in mission planner).
with same drone when i use CUAV 2HP for similar purpose i don’t see this issue and its never reaches even 0.5 through entire flight.
Here i am attaching the some of graphs:
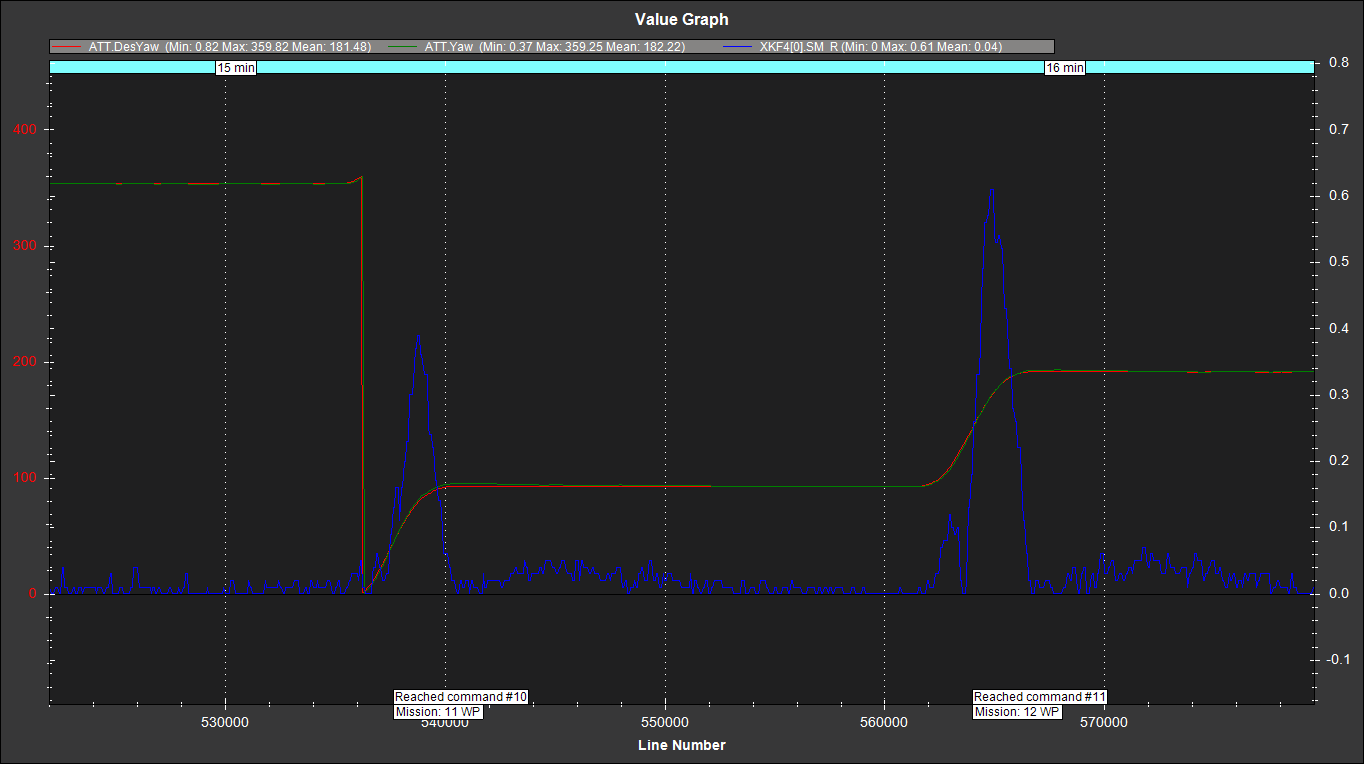
I don’t think you have much cause for concern here. What we can glean from this plot (representative of the entire flight) is that yaw innovation increases with roll, which we would expect, since the yaw measurement requires lateral (earth frame) distance between the antennas, which is reduced during roll maneuvers. However, the innovations rarely exceed 2 degrees, which is hardly worth worrying about. We can see that, while in motion, yaw follows calculated course very nicely, so the system is performing well, and any minor deviation in yaw is corrected very quickly upon rollout.
The flight profiles differ significantly. In the log with the HerePros, bank angle was frequently a bit over 30 degrees. The flight with the CUAV module barely exceeded 20.
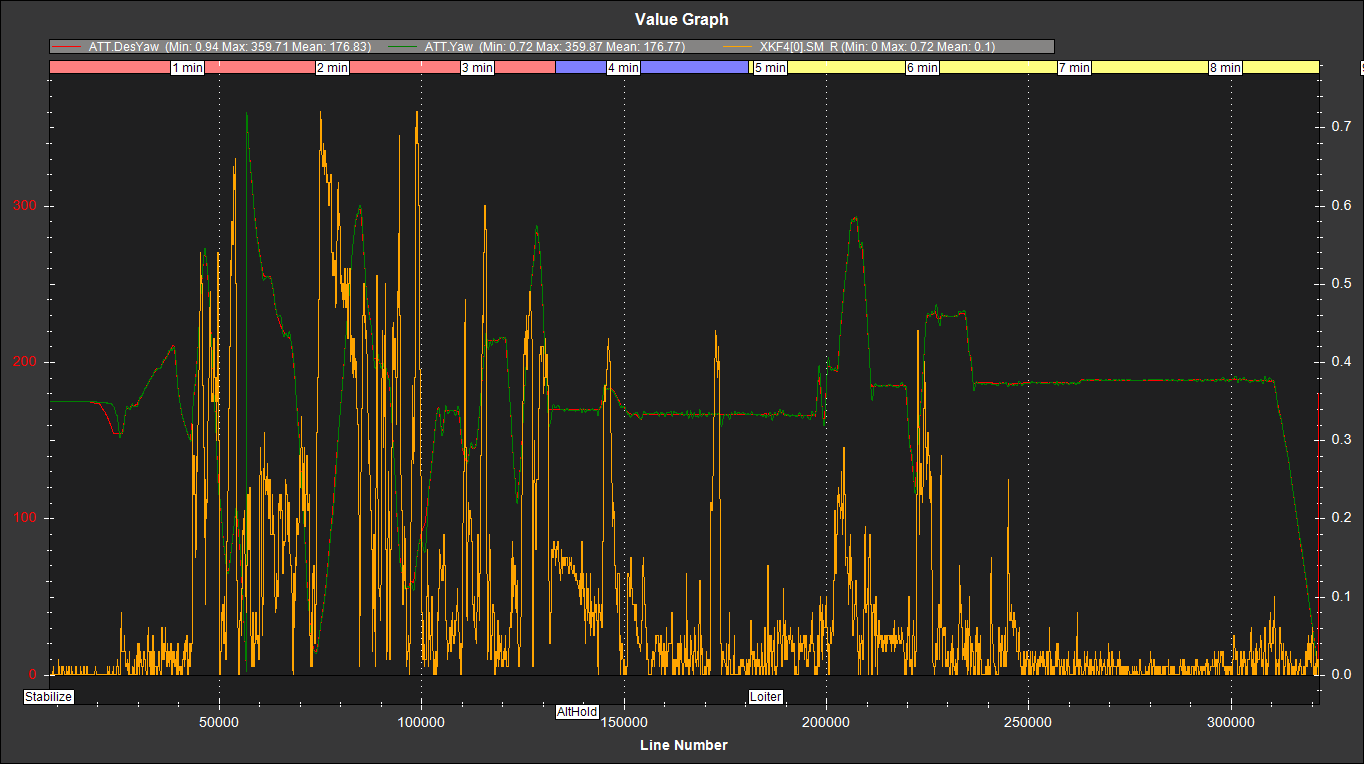
Interestingly, while mag field variance remained quite low, yaw innovations with the CUAV module frequently peak at over 5 degrees, even when maneuvering is benign. This suggests that the HerePro modules are actually outperforming the CUAV module by a significant margin, and I think you’d see increased variance if you maneuvered more aggressively while flying with the CUAV module.
I have a theory to which @priseborough or @peterbarker might be able to lend some credence. The u-Blox GPS modules provide a wealth of data, and the yaw solution is likely more rigorously checked than with the lesser data set transmitted over NMEA by the Unicore unit. As such, it’s possible that the EKF must “trust” the Unicore solution a bit more implicitly, making it appear at times to be more performant, when the reality is likely the opposite. Unfortunately, I don’t have quite enough depth of knowledge on EKF state covariance, the underlying algorithms, and exactly which data to examine to prove the theory.
EDIT:
I just realized these are completely different vehicles with different autopilots. So this is not an apples to apples comparison and likely blows my theory out of the water entirely (still curious if Dr. Hall might weigh in, anyway).
The vehicle with the Cube has significant vibrations in all axes, which will certainly contribute to EKF variance. The other’s, while still needing some improvement if possible, are about half that magnitude, which would help account for lower variance across the board.
It’s also possible that the “Dhaksha-E7” (custom firmware?) has better IMUs than the Cube, which might keep the EKF a little tighter overall, especially with respect to GSF.
The Cube hard Mounted has Higher Vibration yes i agreed. then i was just reworked with external damper and now vibration on all axes are under 15m/s/s.
please refer to the previous Googlr drive drive link to get the less vibration Flight log named 10km range with 20kg payload.
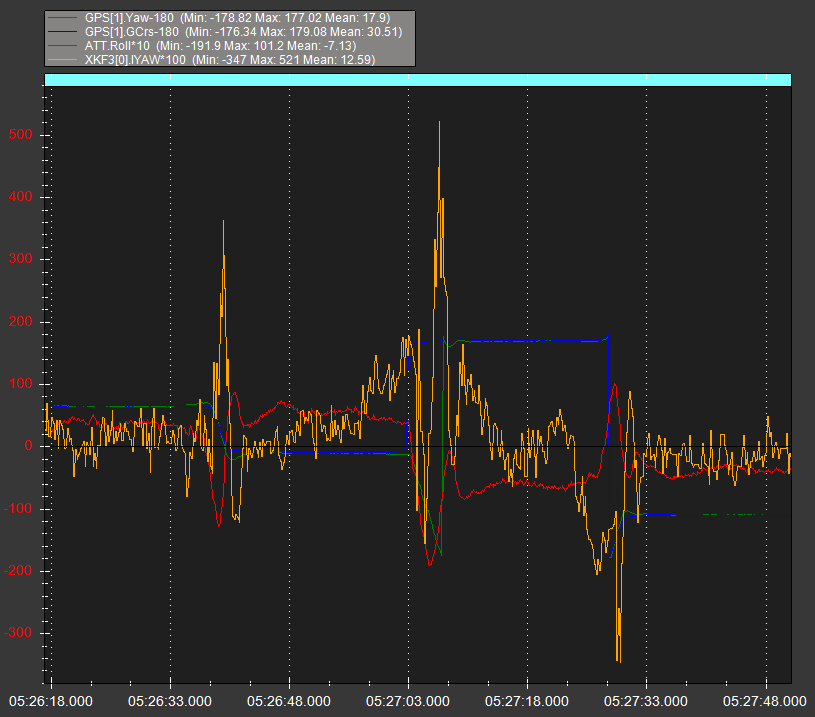
below is the EKF mag variance extracted from that log
Vibration is MUCH improved in that log, but maneuvering is even less aggressive, yaw innovation is almost insignificant, and EKF mag variation spikes only briefly (and within acceptable range) during the largest banking maneuver.
The two autopilots do not appear to have the same signature. They have differing hardware IDs, and on the Dhaksha-E7 version, only two IMUs are logged. Again, it seems an imbalanced comparison, so it’s hard to draw real conclusions.
Be careful over-damping the Cube mount. It could adversely affect IMU response and cause instability.