Hey there! Thanks in advance for taking a look at my request for help.
I have a large quadcopter on 3.7dev, it has been tuned but I am unsure if it needs to be tuned (or sable enough to tune) with the attached artwork.
1000M Quadcopter
100kv motors
30" Prop
Pixhawk 2.1 Cube
6S
My main goal is to have this craft safe to fly, it’s quite unstable with the attachment.
The copter seems very stable without the attachment, but it’s not very fast or nimble due to it’s large size.
Would it be safe to re-tune with the attachment?
Is the craft underpowered ?
Should I consider an X8 over a quadX ?
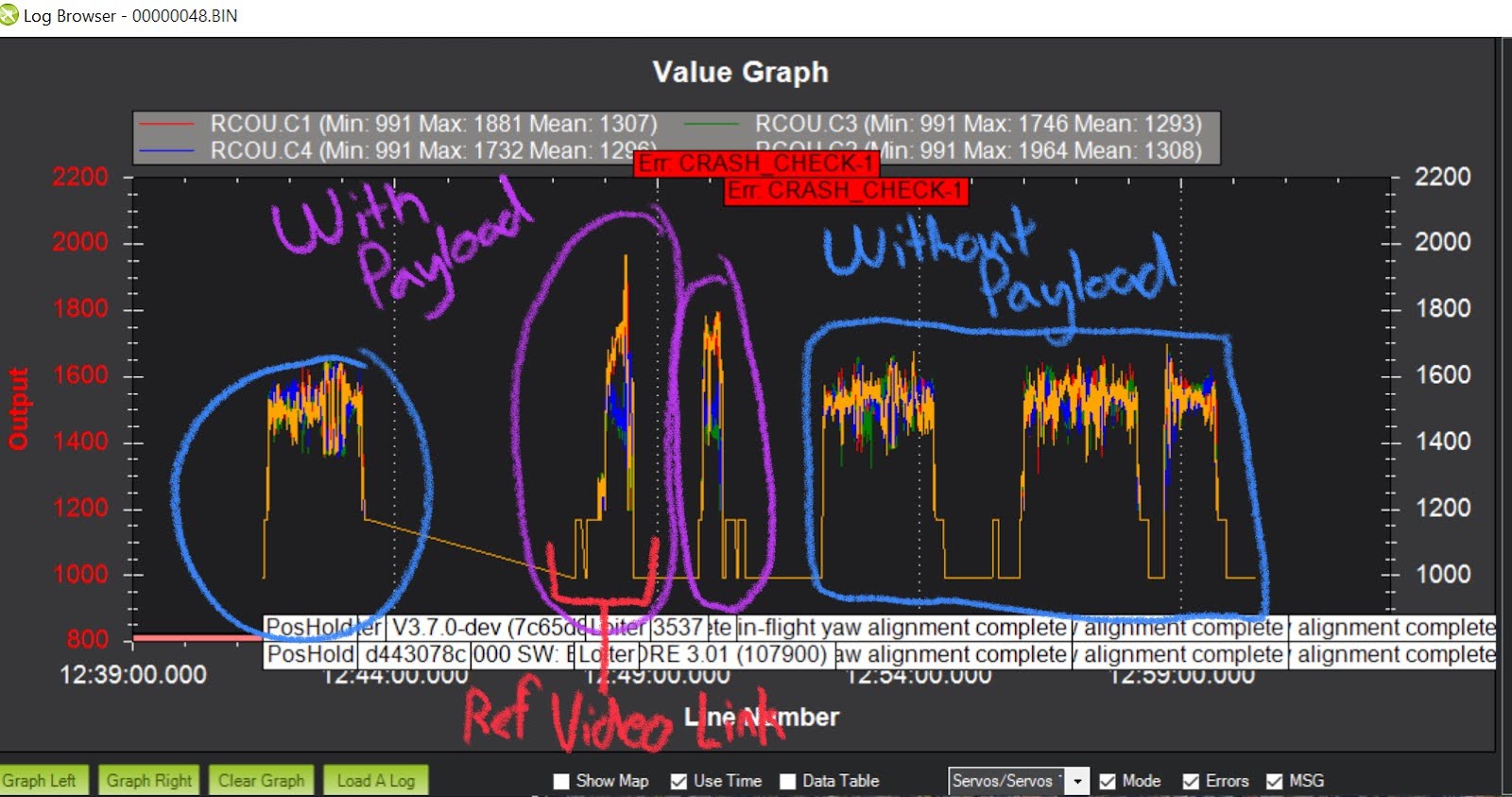
Here is a flight video with the payload attached, might help in referencing the attached log #48:
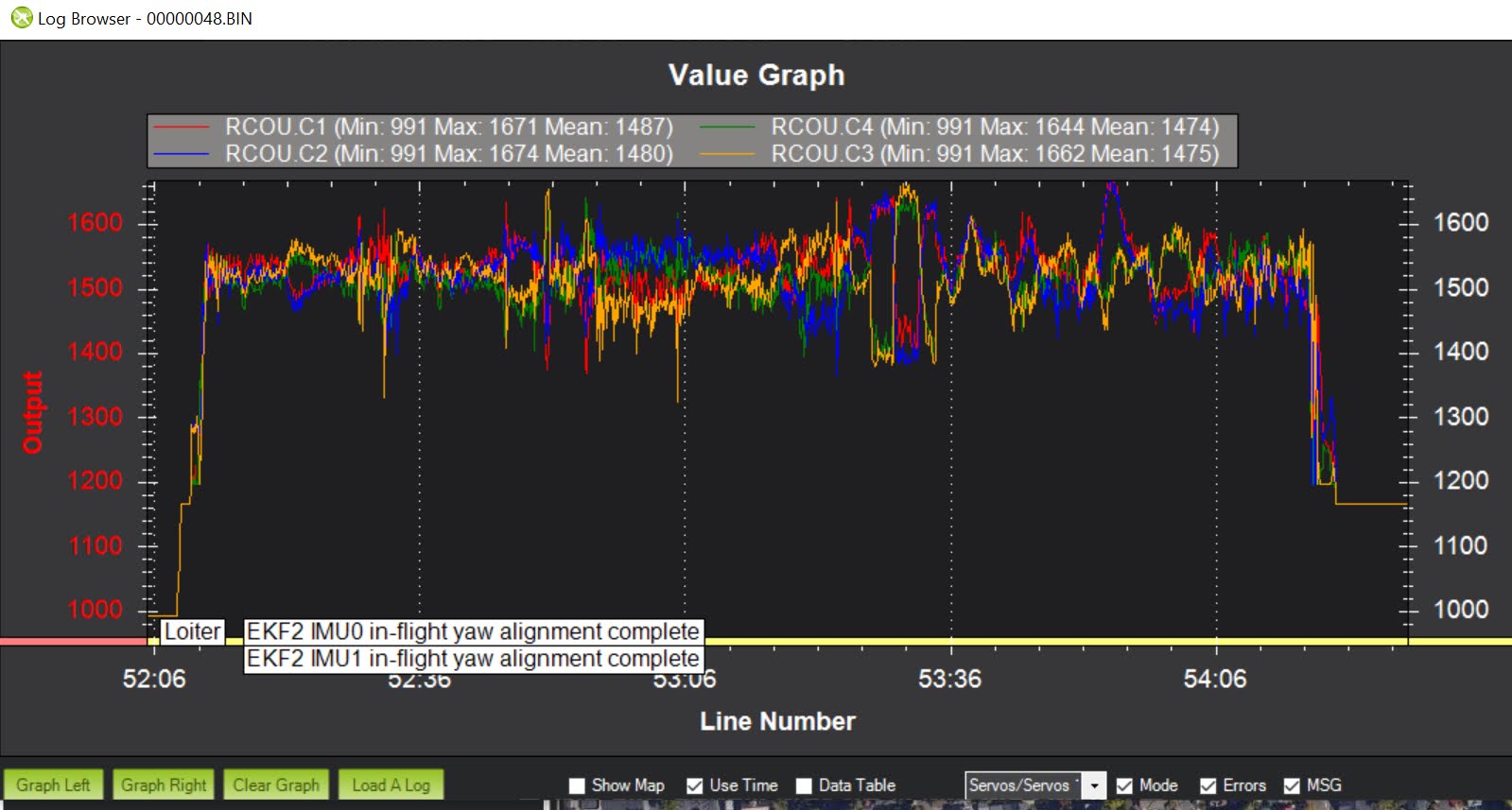
Motor PWM without attachment:
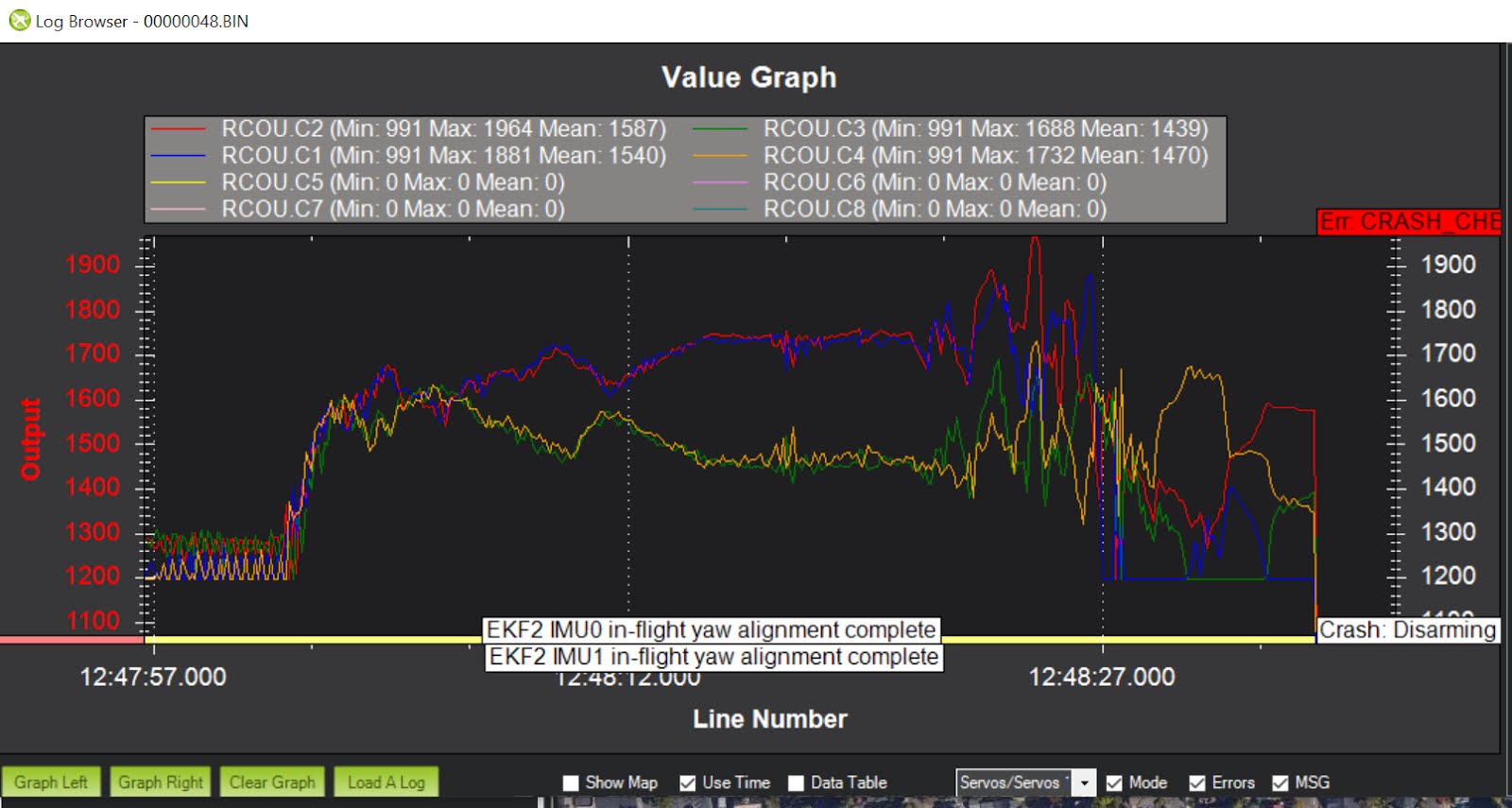
Motor PWM with attachment, also seen in the video link.
Link to download the log:
https://drive.google.com/file/d/1yRkT50e0B7BKKfMzqQOalaYOtcxKgjyQ/view?usp=sharing
Here is the auto analysis info:
Size (kb) 30529.916015625
No of lines 351323
Duration 0:18:55
Vehicletype ArduCopter
Firmware Version V3.7.0-dev
Firmware Hash 7c65d89c
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = WARN - Moderate change in mag_field (34.13%)
Max mag field length (552.47) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.25, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1307, 1308, 1293, 1295]
Average motor output = 1300
Difference between min and max motor averages = 15
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data