There is a few things going on.
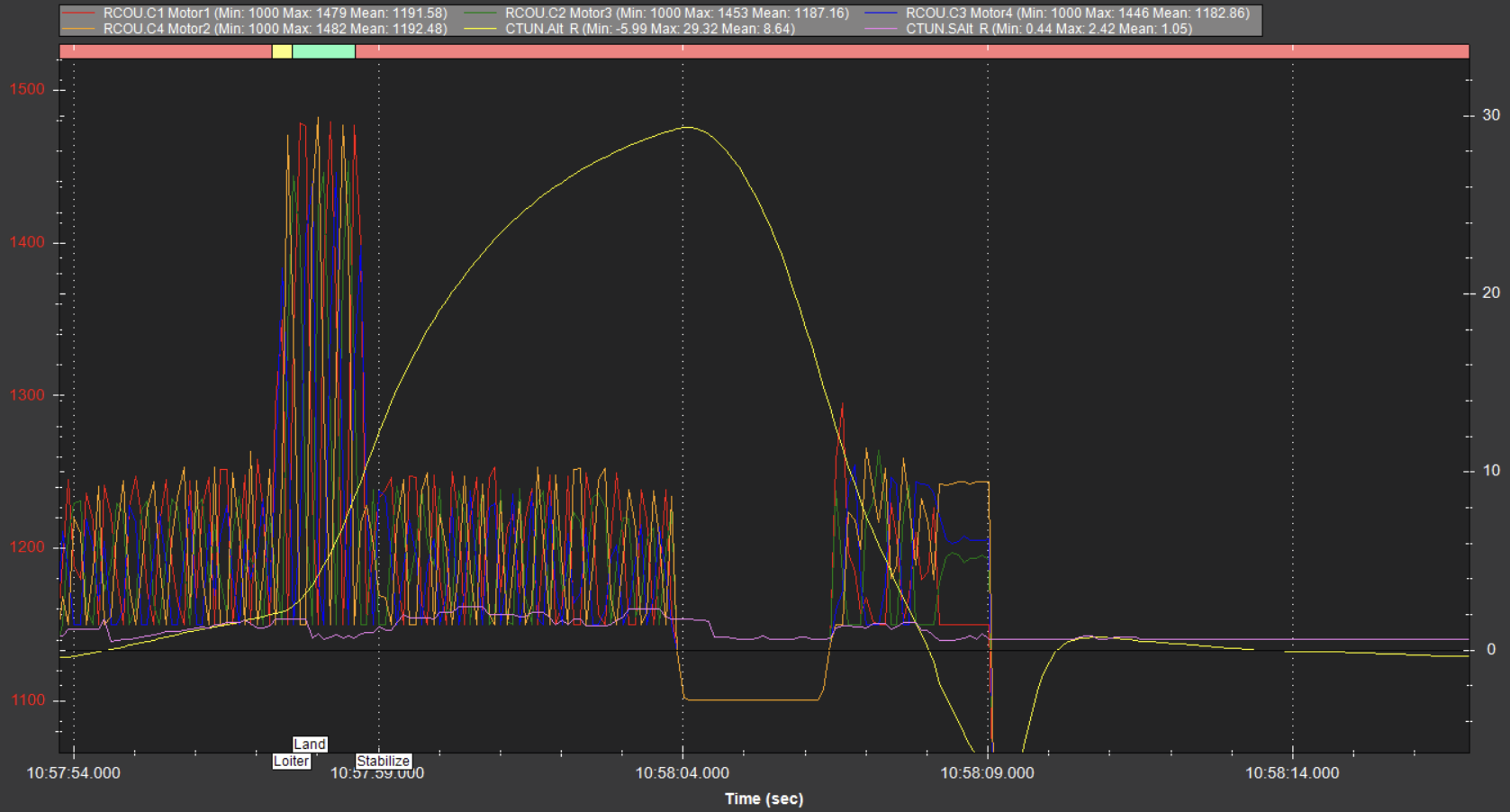
Stability and oscillations, motor outputs frequently going to minimum.
That means when trying to maintain altitude the motor outputs can only effectively go up.
Also the Rangefinder. You can see when the barometer altitude is increasing rangefinder alt even goes down for a bit, then stays fairly steady at a low altitude.
So you will have to revisit the rangefinder, or disable it entirely until you’ve completed tuning.
Try changing these paramaters which might suit your small copter a bit better
ATC_ANG_PIT_P,8
ATC_ANG_RLL_P,8
ATC_RAT_PIT_D,0.002
ATC_RAT_PIT_I,0.080
ATC_RAT_PIT_P,0.080
ATC_RAT_RLL_D,0.002
ATC_RAT_RLL_I,0.080
ATC_RAT_RLL_P,0.080
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
INS_HNTCH_FREQ,120
INS_HNTCH_BW,60
INS_HNTCH_FM_RAT,1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
MOT_PWM_TYPE,6
MOT_SPIN_ARM,0.09
MOT_SPIN_MIN,0.12
DHSHOT600 will be more than enough, and fits in better with loop rates and seems more reliable with some ESCs.
Now just hover in Stabilise and try AltHold, some gentle pitch and roll if possible.
Let’s see that log file.
EDIT
I saw the betacopter thing too and wondered what it is. It seems a fork of standard ardupilot, but is maybe not recent. Maybe olliw42 set it up for some testing??
How did you land there and decide to use it?
I would change to latest stable Arducopter firmware right away.
EDIT some more
" If you want to make best use of your STorM32 gimbal and want 2020-ish capabilities, then you may want to chose BetaPilot (BetaCopter/BetaPlane). This fork of ArduPilot is specifically designed for the STorM32 gimbal controller, and provides the best range of functions. For details see Using STorM32 with BetaPilot."
I wouldnt have thought you’d be using a storm32 controlled gimbal with a 7inch copter, but I guess it’s possible. This implies lots of video work, and I think you’d want to be using latest stable firmware for reliability and current fixes, rather than having an extra gimbal feature or two.