@Swebre, thank you for the encouragement. 9+ acres at 17 miles! I know you feel my pain when it comes to seeming like your life is spent mowing grass. I am working on this project with my 13yo step-son. I feel like this is a good project for us to bond on and eventually be able to spend time together on other things besides mowing grass!
The linear servo you recommended arrived yesterday and fits absolutely perfect. I am unable to test the force of the servo but I suspect it will be just fine so thank you for the recommendation.
I was struggling with understanding how all of the parts connect and for that matter what parts I should be looking at.
I know there are no 2 configurations that are the same and I understand @Yuri_Rage reminding me of this.
If I understand at least one of the configurations it goes something like this…
GPS/GNSS antenna → GPS/GNSS receiver (ex simpleRTK2B) → PC running MissionPlanner → telemetry radio TX (ex mRo 915Mhz) → telemetry radio RX (ex mRo 915Mhz) → GPS/GNSS receiver (ex simpleRTK2B) → GPS/GNSS (ex simpleRTK2B) - flight controller (ex Pixhawk) → servo(s). I know this is a very simplified example that I hope someone can confirm or correct me if I am wrong. I have purchased parts based on the simplified configuration I listed so I hope it is at least close.
Close…. Telemetry receiver on the rover connects to the flight controller along with the gps, servos, and power source (BEC). I am using different gps’s and my Flight controller (and yours can) will feed RTCM back to the gps.
Give a shout if needed and I will help if I can. Too many options for this to be simple…
Steve, thank you so much for reviewing my posts and helping me understand how the different components connect! I will very likely be calling you later this week as more of the hardware I ordered starts showing up. If I lived closer to Louisiana my step-son and I would stop by to see your rig in action!
You can direct message also within the forum just as easily. If the design is your own, and you want to share it, I don’t see why you can’t post it or host it on a site like GitHub and link it here.
I found a number of designs right here on the Ardupilot website last night under the different flight controllers while looking for how to configure Ardupilot/Mission Planner for a rover. Thanks to these high level designs and help from others I have a better understanding of how folks are connecting the different devices and somewhat why. Now if only I can figure out why MP is telling me the Rover FW is loaded but copters are the only frame options I have available. Looks like more reading, Google, and YouTube research. I installed MP V1.3.77 and arduRover V4.1.5 if anyone has any ideas I could use the help.
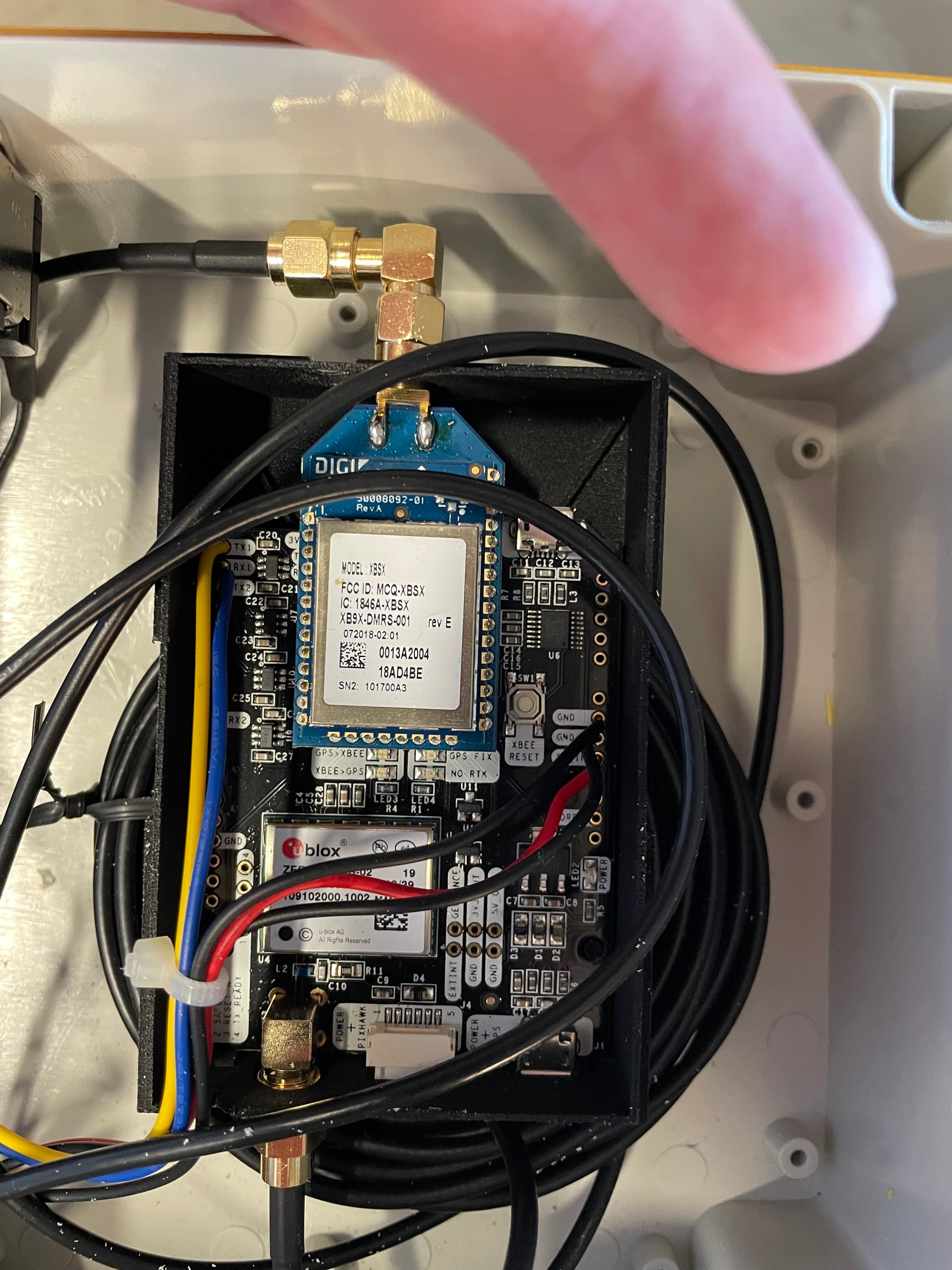
Well I am working on activating the mower GPS systems and I have made some changes based on what I have learned, I have decided that I am not using the Simple RTK2Blite board and I am switching over to using to full size Simple RTK2B boards. While I am waiting on the second Ardusimple board to arrive I started trying to implement the single GPS RTK board with it being fed the RTCM3 signal from the base station. It is still a work in process but I am not done yet, There are several bits of good news even though it is not working yet, The base station is transmitting the RTCM3 correction signal over the x-bee radio attached to the side of the Ardusimple board perfectly and received on the x-bee radio on the rover Ardusimple board (according to the flashing lights on the board). However, the Ardusimple GPS board is not communicating with Mission Planner yet. I think I have it corrected right, even though I have soldered wires to the Ardusimple board, since I did not have a connector to match the one on the board. That connector has thrown me off a bit. I have several Orange Cube cable sets, cable building kits for the GH1.25, and nothing in my stash would fit the connector on the RTK2B board. Here is a picture of the connections. Mission planner acts like nothing is plugged in. I could have it wired wrong or have it not configured right. I bought this board from ArduSimple pre configured, which was probably wasted money. I also noticed there is another UART on that board, maybe I am wired to the wrong one. It wouldn’t be the first dumb mistake I have made. Maybe I just need to slow down and configure this board on U-center.
Do I need to use u-center to set a certain baud rate on the SimpleRTKB board. Since I am not going through Mission Planner with the RTCM3 signal I don’t know how many parameters are set for me. I’ll go switch the wires right now and test. I have not set any baud rates.
Highly recommend using GPS_AUTO_CONFIG instead of uCenter. I think all ports end up at 460800 that way. Set GPS_DRV_OPTIONS=1, and then match the baud rate with your external RTCM3 source.
GPS_AUTO_CONFIG is currently set to 1
GPS_DRV_OPTIONS are set at 0
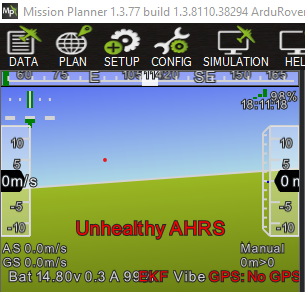
I have switched the TX and RX wires to the GPS board with no change, I have also made up a cable with the GH1.25 connectors on the end and tried that option. So far Mission Planner always says GPS: No GPS
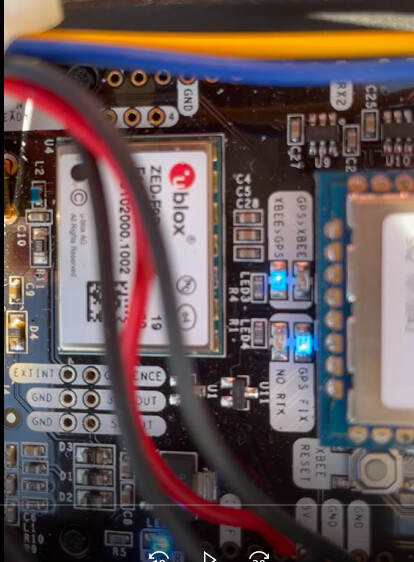
The board is powered up and the GPS FIX light is flashing
and the XBEE>GPS light is flashing.
I am sort of stumped but I will keep trying to figure this out. It will get figured out. I also have a new set of cables arriving from Ardusimple in a few days.
Thanks so much for your help. Is the reference to wki set pointing to the ardupilot.rover docs/common-gps-for-yaw where the parameters are listed?
I am confused though because right now I am only trying to get a single GPS board hooked up and working (not GPS YAW yet). That will be later on after I get the other board. Is setting the parameters to match the moving baseline parameters the right thing to do right now.
Related is also the GPS_DRV_OPTIONS parameter. If I put a 1 in there wont it tell the tells the u-blox GPS driver to configure the two GPS modules to send RTCMv2 data over UART2.Right now I only have one GPS module.
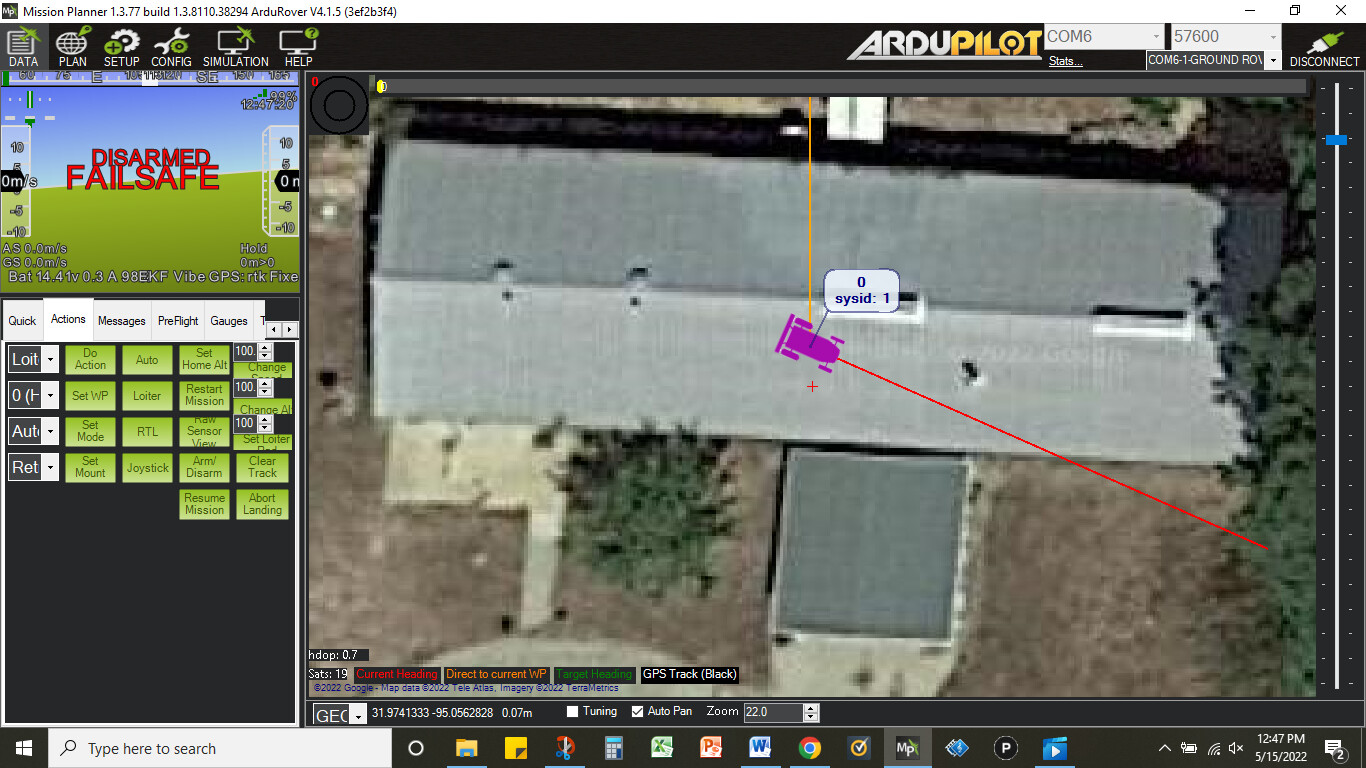
Well Yuri we have some success here thanks to you. The parameters you mentioned were already set, but I checked them and did the following:
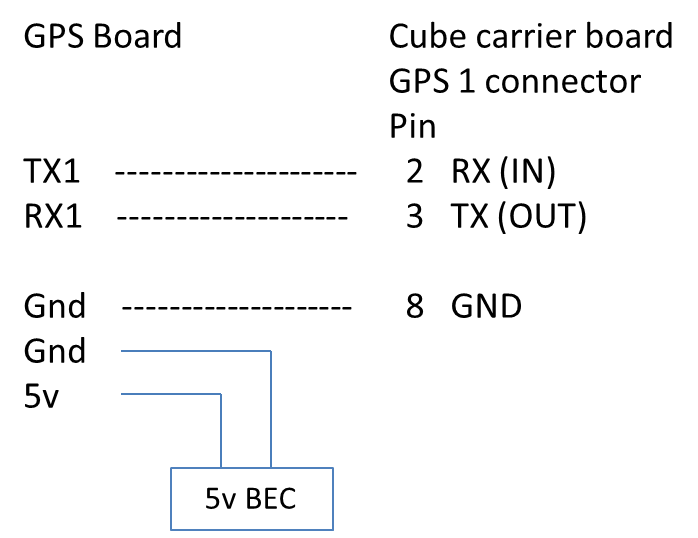
I made a new cable to go from the SimpleRTKB JST-GH 6pin connector to the Cube carrier board JST-GH 8 pin GPS 1 connector.
I also set the GPS satellite antenna out on the roof just so I didn’t have to move the mower (I have a long cable).
I also turned on the base station to broadcast the RTCM signal.
@Yuri_Rage I did get the additional SimpleRTKB board and later this week I am going to try and activate the GPS-YAW. You mentioned that I need to match the baud rate on my external RTCM3 radio. I will figure out how to do that but I had a question. If I change the baud rate on the Ardusimple X-bee on the rover end, do I have to change the baud rate on the transmitting radio for the pair to communicate and do I have to change the baud rate of the other SimpleRTKB board back in the base station?
I also need to confirm the baud rate that I need to set on these systems.
Thanks in advance for your help, you make a difference in these mower builds!