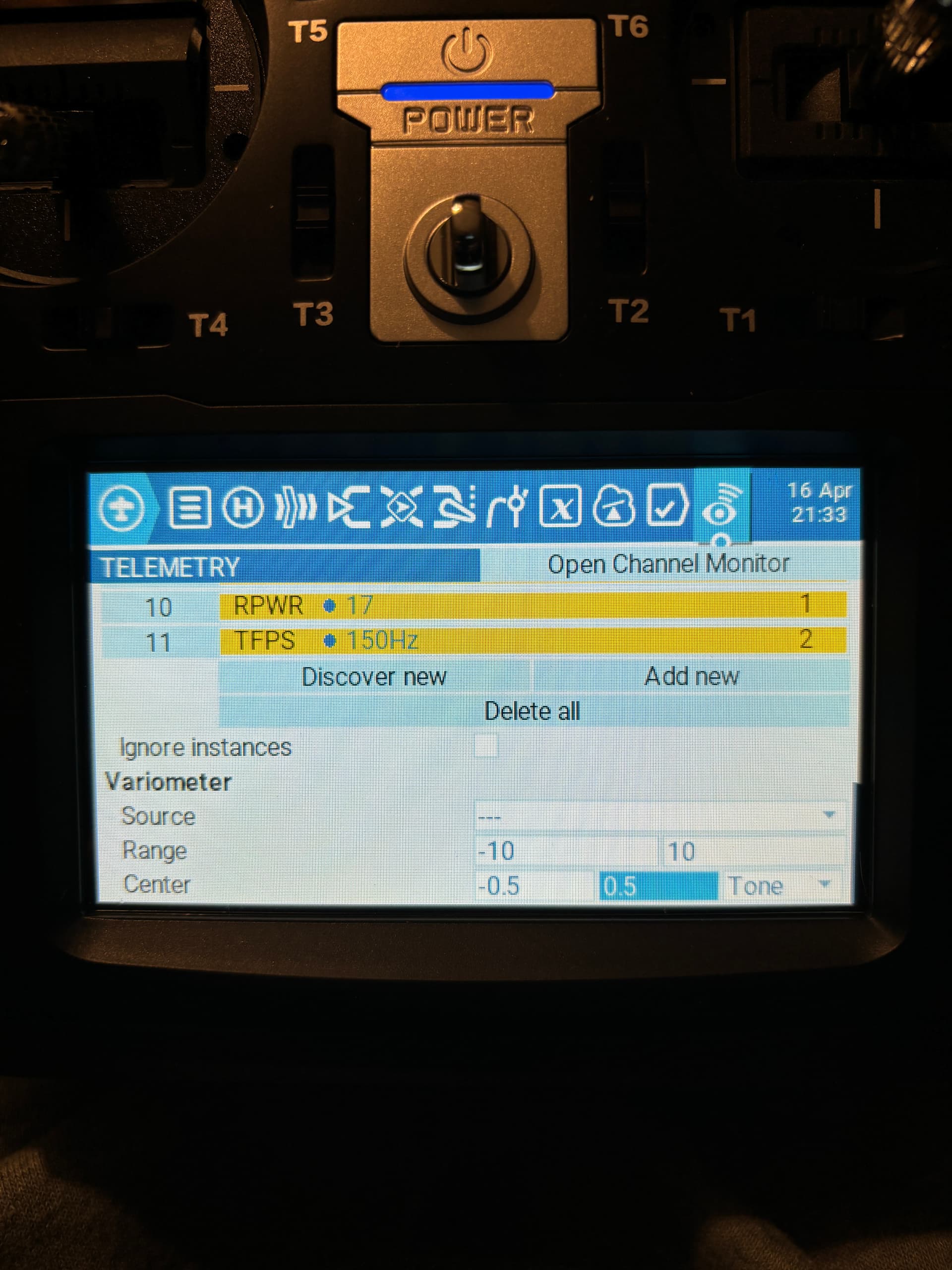
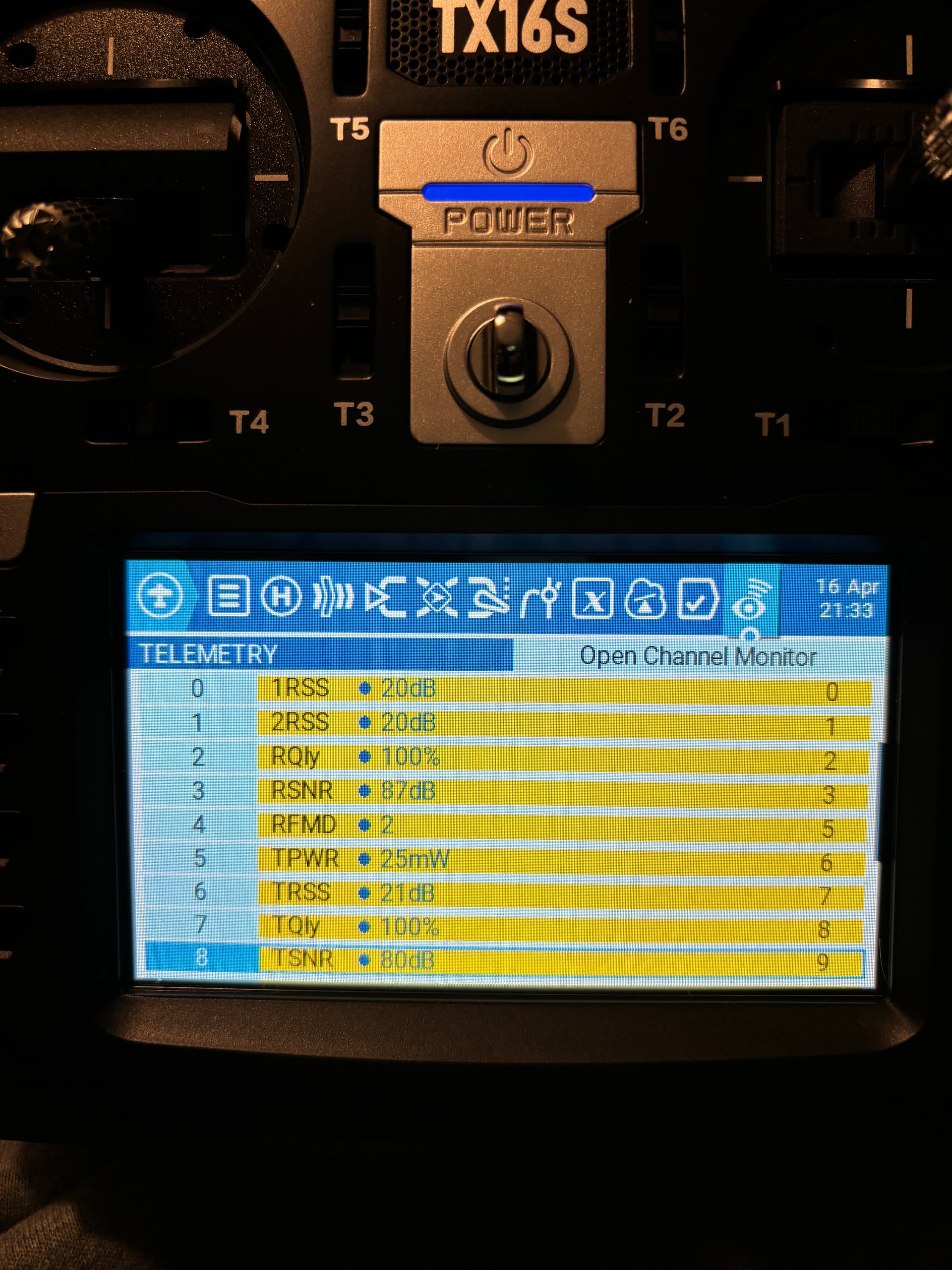
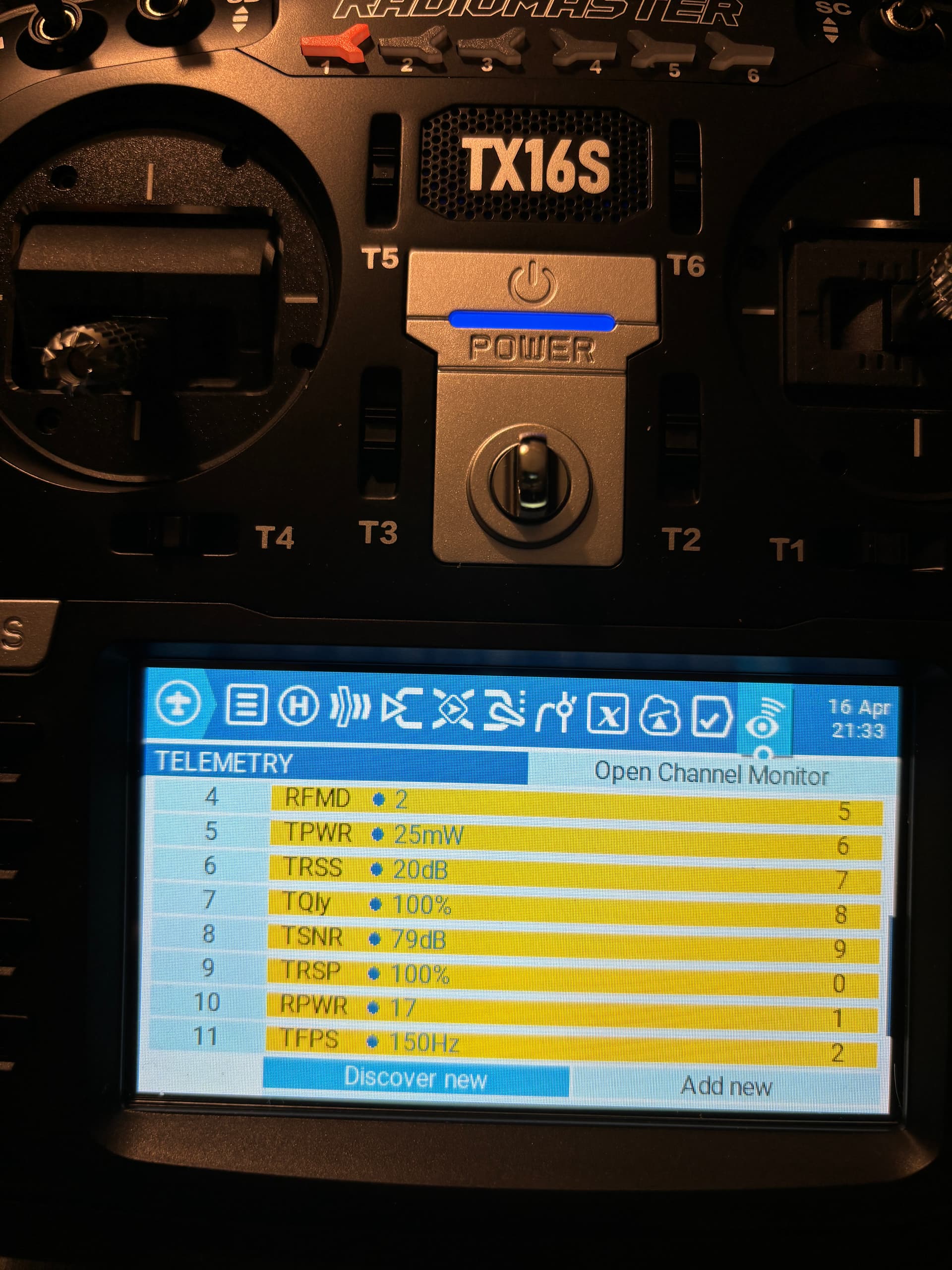
I am only seeing very few sensors in Telemetry page using CRSF which I believe is the reason that Yaapu Lua script is not working for me. My rig config is below:
Kakute H7 mini V 1.3
Crossfire Nano RX and Crossfire Micro TX V2
Copter 4.4.4
RadioMaster TX 16S MKII running Edge TX version 2.7.1
RX Connections:
RX_GND → UART 6_GND
RX_5V->UART6_5v
RX_Ch1->UART6_R6
RX_Ch2->UART6_T6
serial6_protocol set to 23 and serial6_option set to “0” per instructions here
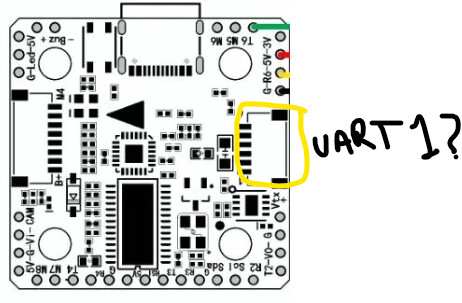
I think I have the answer, but would like to get the confirmation from the experts. I think I should have wired the RX to Serial1/UART 1, but instead wired it to Serial6/ UART6 as per the instructions from holybro. Please advise if connecting the RX to UART 1 will do the job? If so then is below UART 1 on Kakute?
.
S1-S3.jpg are the current sensors showing in my TX
Kakute_Mini_H7_v_1.3.param (19.4 KB)
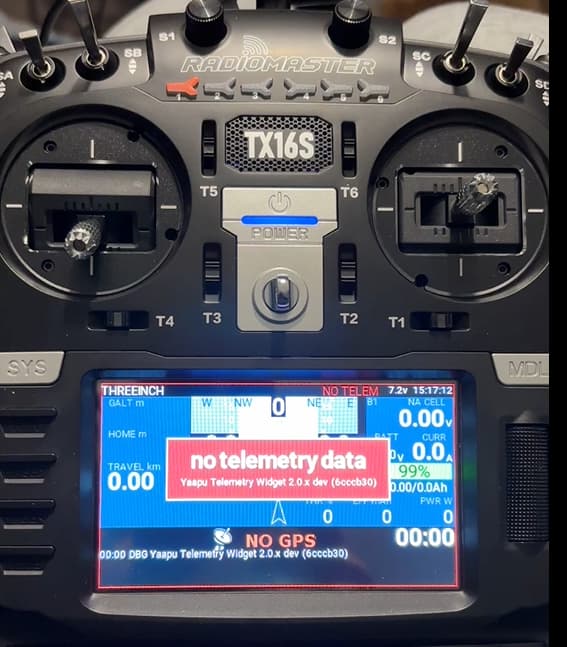
Also, wanted to confirm that the this link is the version of Yaapu script that I need to use for my Edge Tx based TX. Here is what I am showing for Yaapu Telemetry screen
I had connected FC and RX as below to get mavlink data in order to calibrate GPS and Accelerometer for my 2 inch quad which has been successful
RX CH 3 Mavlink.RX → FC UART4 TX
RX CH 4 Mavlink TX - > FC UART4 RX
I can now start figuring out why my 2 inch quad does not fly. I have used the SIK radio telemetry and Yaapu to troubleshoot my larger sized quads with Pixhawk4 and Cube Orange that now have the restrictions for flying. Once I figure out the config on this rig, I will then move on to building 5" rig below :-). Wish I had come across below before I started my 2 inch project.
 .
.