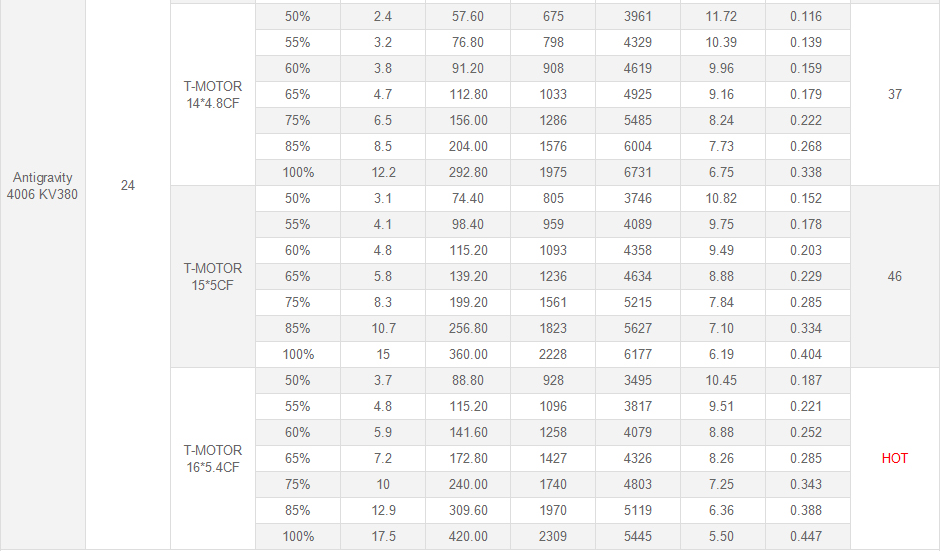
Recently built a 640mm quad with 17" blades. t-motor 4006/380 antigravity with t-motor M1704 props. Maybe these are too big - I have about 1/2 to 1" gap between them.
I have done autotune twice - second time was a bit better. Forward flight is fine, hover is fine. The PIDs seem a “little” loose/sloppy, and the D term is 0.001 - not sure what that’s about.
I’m carrying a 6S 13,600 mAh Li-Ion battery that gets more flight time than I want to stand in my drive way. The config on the quad is 4G/LTE back to ground station.
What I’m experiencing is when I do a sudden stop in Loiter mode or turn quickly, the quad oscillates badly, although it seems to recover every time - scares the heck out of me and does not seem safe (see video - sorry about quality, this is PiCam NoIR).
BIN file below from flight on 5/2 - the flight above actually starts around 39% of the way through, synced with the video around 44%. (I don’t have good 4G signal from my driveway - have to get up to 60 feet first, then I have good signal and can fly around).
Vibration on board is minimal - the Kakute has some isolation around the IMU to handle that, and the readings in the log seem minimal. It may be that PIDs need to be higher - maybe I go with small props? Looking for advice? My goal is to get long(er) flight times.
You have a high thrust/weight on that craft with learned MOT_THST_HOVER at .125. This isn’t necessarily a bad thing but it can make the tune more challenging. Smaller props (or more battery weight) probably would make this easier but I wouldn’t do that yet as other characteristics of the craft look good. You are not driving those Motors too hard with those props so no reason to change on that account. I would reset the PID’s back to Tune Instructions default, lower the AUTOTUNE_AGGR to maybe .07 and try Autotune again. If this doesn’t get you there, and it hasn’t for me on a similar thrust/weight mid size quad, you may have to resort to manual tuning. This isn’t difficult but time consuming and a challenge if you haven’t done it before.
Yes, the motors seem very capable of swinging the 17" props that I have, which are T-motor MS1704 props. They weigh only 23g each, which is really light compared to other alternatives. My amp draw during flight seems fairly efficient (still working on calibrating amp draw exactly). The only concern I had there was the props in the back come within 1/2 inch of each other. I don’t know if that could cause some prop-tip vortex thing. I’m definitely no concerned about the motors - they come down almost cold and even after quite a bit of fast forward flying. Yes, the MFG says 15.5" is recommended, but those recommendations were created LONG before t-motor came out with light weight polymer props that weigh quite a bit less than their CF counterparts. Although, I’ve been staring at KDEDirect 15.5" props, which according to eCalc.ch they offer a great deal more efficiency (for $270 bucks, they better!!!)
I’m running 6S4P Li-Ion - tested out to 13,800 mAh (Panasonic GA cells). They’re more than capable, but may opt for 6S8P for longer range and more weight, as you mention.
So you think “lowering” the aggressiveness of Autotune would help? I may try that. I’ve started to try and manually tune using CH6 and doing roll and pitch first. I’ve tuned a LOT of mini quads, but never something like this - and mostly with betaflight.
As I tighten up the PIDs, I notice that the quad does feel more locked in BUT just every now and then - can’t tell if it’s wind or something else, it seems like one arm dips and then she fights to recover by rocking fairly violently until back under control.
If you have similar quads, even with a good tune, do they still rock a little with a bit of a gust (say 10 mph)? I’m used to smaller quads that don’t even notice 20 mph wind much… I’m wondering if my D-term is just allowing too much overshoot. Too much D-term, and she gets really sluggish.
Thanks for commenting - I appreciate the feedback. I will eventually put an HD cam on the bird - as you mention, Runcam 2 (I have several of them, and a GoPro Hero, etc.). Right now I’m trying out uavcast and 4G/LTE connectivity. I’m definitely going to get a better camera than what I have. The PiCam NoIR is NOT for outside, for sure.
I’m trying to keep the weight super low on this quad. Looking for 45 min to 60 min flight times with 20+ mph flight, so minimizing hardware for me is key.
I would still suggest that you contact T-Motor and ask them about 17" props even if they are lightweight. They do all the due diligence for us. On my HexaQuad you can see the turns are beautiful and I did not have to do a single PID tuning at all. Simply used default values for everyhting and it flew like crazy with zero issues.
I’ve been tuning all day, actually. I finally found, this evening, the perfect settings. Even my fast forward flight seems very locked in. I did an auto mission around my property at 80 feet. Granted, there was no wind, but everything went flawlessly.
I using uavcast (https://uavmatrix.com/). The video I posted earlier is streaming video to Mission Planner via 4G/LTE using uavcast, and telemetry data. It works quite well! I purchased a SIM card via Mint Mobile - bought the 8GB/month plan and prepaid for 3 months. Then on eBay, I bought a Huawei E3372h-510 modem (because they’re small and light weight). Mint Mobile is really T-Mobile, which…right where I’m at in the country is a tiny bit of a dead spot. I have to get around 60 feet up before it’s really fast enough to stream video. So I’m using my home Wifi until I’m about 60 feet up - then my VPN connection switches over to the cell modem, and I’m off!
Please ignore the giant mess that is my workbench - looks like this when I finish a project or more…
Anyway, I think once I had adjusted my expectations a bit with regard to autotune, and just tuned manually, I am much happier. I don’t see the copter doing what it was doing - the tune was just sloppy by autotune. I wound up with higher P and I values, and my D-term is about 4 times what autotune came up with. Seems pretty locked now - totally my fault.
I’m hovering in 10 mph wind about 8 amps, and with very little to zero wind, I’m doing 11 mph at 7-7.3 amps. I’m putting back about ~100 mAh less than my current meter says. I’m happy with this setup now because I could add twice the battery and still fly - of course, there are diminishing returns there, but I’m anxious to see if this bird can still fly at 18v on 6S (yes, I said that correctly).
Looks good. As I mentioned I have found that Autotune doesn’t always do the best job with multirotors outside a certain envelope. My 550 with 13" props is very similar to yours in performance. Less flight time surely but Hover current and forward flight about the same. I had to manually tune it and even some of the suggested Initial Tuning parameters didn’t work well. I am using FFT based notch filtering which makes for a better tune for sure.
Can you give me the link of the props you are using. I am unable to locate them on T-Motor site. I will ask T-Motor about them and if they support them then I will try them as well.
uavcast (https://uavmatrix.com/) So how their business model works. So you buy an yearly subscription, load the software on Rasberry Pi, use a USB 4G dongle and connect any camera to the Rasberry pi?
Will it support High Def cameras?
Your bench is perfectly fine, this is how it supposed to be, till the wife walks in… lol
Your workbench is nice! I was able to angle the photo so as to miss most of my mess. I’m horrible. If I did YouTube build videos, I’d have to have two workbenches - one for show, that I never touched, and one to do actual work on!
Yes uavmatrix.com / uavcast - the owner/developer is terrific about answering questions and discussing feature requests, etc. I can’t recommend that enough. I bought the gold pro version - and will continue to do so to support developments like his. It is really easy to use.
Now, uavcast is the back haul for both streaming video AND telemetry. So you can watch video in Mission Planner and control the craft. You do need to use either the PiCam, one of the supported USB cameras (not recommended in my opinion), or get a CSI-2 to HDMI adapter for $30 on ebay. These allow you to plug any HDMI camera into the pi through the adapter. The GoPro or Firefly Q6 4k are some of the better cameras to use here because unlike the Runcam 2, they have an HDMI output. I just bought a Firefly Q6 160 degree Split camera, but won’t be here until later in June.
If you’re really sneaky, though - and this is my longer term plan - get an analog to digital converter - RCA to HDMI (strip down everything - plastic, large RCA connectors, etc. so it’s lighter weight), then run a standard Runcam Eagle or something good - analog signal into the converter, then HDMI output into the CSI-2 pi adapter. With that, you could still inject OSD and maybe forego playing video in Mission Planner and just use gstreamer to play the digital video on your laptop. Or, with a pair of Fatsharks, connect goggles to laptop via HDMI as second monitor, use gstreamer full screen on your goggle’s screen, and mission planner on the other. This would be my preferred setup.
The idea isn’t really to make one’s setup easier, it’s to have unlimited FPV at much lower altitude. For me, it might be nice to be 20 miles out, 350 feet in the air, and not have to take the same route home.
Derrick_W lol I know the feeling. I keep a separate room just for my RC hobbies.
Last year I wasted about $300 dollars with this guy in Russia, https://github.com/minla-rc/Minla-LTE-Receiver#minla-lte-receiver his solution never worked in the US. He claimed he can do LTE 4G, High def and full radio control now the guy disappeared. So not a big fan of eastern European developers so far…
Why uavmatrix has decided to use Rasberry pi which will not support high def cameras. Interestingly my primary company builds LTE networks for verizon and ATT nationwide. I mean apps like Whatsapp, facetime etc. provides amazing results over 4G and once we are done deploying 5G, we are talking broadband speed. so I think raspberry pi as a hardware is not a good fit in my opinion.
Is uavmatix looking into a better board with full high def camera support? Believe it or not, but the cost to develop and manufacturer an android phone in China is about $10 dollars out the door in quantity such as Leagoo phones.
I currently use DJI Occusync and DJI Goggles for amazing 7.2KM live video signal and for telemetry RFD900x modems. I am in discussion with Ardupilot team to fund adding full telemetry support for full DJI OCcusync in the near future so you can see telemetry data within the Goggles.
I can give uavmatrix a shot it is not that much money just to monkey around with it and see what it can and can not do.
Does UAVcast solution connects with uavcast servers also while in use? if yes, then for me it’s a huge privacy and security issue.
…just reading your response - what makes you think Rasberry Pi doesn’t support HD cameras? It has a camera input, which can run to a CSI-2-to-HDMI input that will support 720p or 1080p, I’m pretty sure. The PI 4 will run 2 x 4K monitors - plenty of power there I think. Admittedly, I’m running a pi0w which is low power, but with a fast connection, I can stream 720p without issue. I think the network latency is more the issue there.
It’s not going to give you low latency like the DJI system does. That is for sure, but flying multirotors that’s less important for me and my current project. However, there is a guy flying planes with this system. I don’t know if he’s running 720 or 480p, but I know he’s using uavcast, Mission Planner and Verizon: https://www.youtube.com/watch?v=fJh-HP0xEn8&t=98s
Also, no - uavcast is peer-to-peer using ZeroTier VPN or other options. ZeroTier is free - and knowing that your IP addresses will always be the same and that your streams are encrypted, then … yeah, it’s worth using it. UAVMatrix as a company just makes the software.
I will play around with it. I don’t have a lot of experience with Rasberry pi I see it as an entry level processor.
Speaking of latency, 4G an average has 50ms latency and 5G will bring it down to 1 to 5ms. Adding the latency of Rasberry Pi, MP, laptop etc. not sure what the overall latency is going to be. i will figure it out.
I will give it try. At least it works, I have had zero success in the past.
Hello Derrick, your quad is very efficient. I am also building similar to yours, with 6S4P Lion Battery. Auw will be about 2700 -2800 gr. Expected endurance around 50 minutes. What is your AUW (include battery)? What is your endurance?? May I know your Esc.?
Regards.
Tony
I think either of those will work, honestly (either of the HDMI to CSI-2 adapters)
That one will work too.
Yes, I’ve seen the new Pi Cam come out. I’m more concerned with Field of View. If you see the video that I linked to in my original post - yes, I know it’s bad - but the field of view is really small. This is why using something like a GoPro or Firefly Q6 4K, or even Firefly’s new Split camera has an HDMI micro output… Those have 160 degree FOV. This Raspberry Pi camera will probably produce a great picture with a potentially narrow (like 40 degrees or something?) field of view.
Last time I checked, I was at 2050g for AUW. I haven’t flown for more than 41 minutes. I landed the other day with 41:38 and then the battery was at 23.09v, but that was almost all hovering and nothing else. Although, now that I’ve got my current meter dialed in, I’m seeing lower amp draw with 11 to 14 mph forward flight than I am with hover. No idea how that happened.
Since Li-Ion batteries are perfectly fine with going down to 2.5v per cell, I’ll probably fly until around 18v or so and land. The motors I have will run on 4S just fine, so I have MOT_BAT_VOLT_MAX set to 25.2 and MOT_BAT_VOLT_MIN set to 18.0
That said, I’ve never actually flown to 18 volts. I will very soon.
As I said in my first post, I’m using the Kakute F7 flight controller and the Tekko 4-in-1 ESC. They’re BLHeli_32 and I think 30 or 35 amps?
I’m using 22 awg motor wires between the ESC and the motors. That’s probably saving me a ton of weight, and very small 30 awg wires for all other things. The wires are ETFE and not silicone, which actually makes their insulation lighter weight as well. I probably could have gotten away with using 24 awg ETFE wire. We tested it - gets a little warm around 8 amps, goes meltdown around 15 amps. But, my motors are never pulling that much. The thing I didn’t like about it was the voltage drop at 4 amps was still around 200 mv, and that doesn’t seem very efficient. So 22 awg probably added 2-3g of weight compared to 24 awg ETFE.
https://www.youtube.com/watch?v=jTY8N9DYVhs here’s a very short video hovering with 6S4P Li-Ion pack and a short automated flight. I was trying to get the raspberry pi to flip from my home Wifi to 4G.
When I take off, I’m connected to my home wifi. I can darn near fly out to the edge of my front yard (2 acres away) and still stay connected to my home wifi. 4G should take over there. I’m gonna have to pick a different rally point I think. After the Wifi drops, ZeroTier should automatically switch to my 4G modem. Still working on this.
But, in the video, you can see that hovering, I’m using around 8-8.2 amps. While flying forward, that drops down to ~7 amps.
Hi Derrick, sorry are sure that AUW is only 2050 gr with battery Lion 6S4P ?? The battery itself is about 1300 gr (including wiring)… So that means your empty weight is only about 750 gr. While 4 motors and mounting is about 400 gr. That means your frame plus electronics plus wiring is only about 350gr!! Very light … I have big problem to achieve this 350 gr frame plus wiring. Is this correct ?? If this is correct, I think you can achieve more than 60 minutes flight time…What frame do you use? I use Alien H4 folding that is 450 gr frame (with landing gear) only… Very heavy compare to your frame…