I am trying to migrate my drone that used iNav to ArduCopter. I have a Kakute F7 board, and Flit10 Receiver. It uses iBus as the RC Protocol. I have tried multiple configuration but I just can’t get the FC to see RC Inputs.
Hi, if you take the code in the pull request: 16545 on ardupilot.
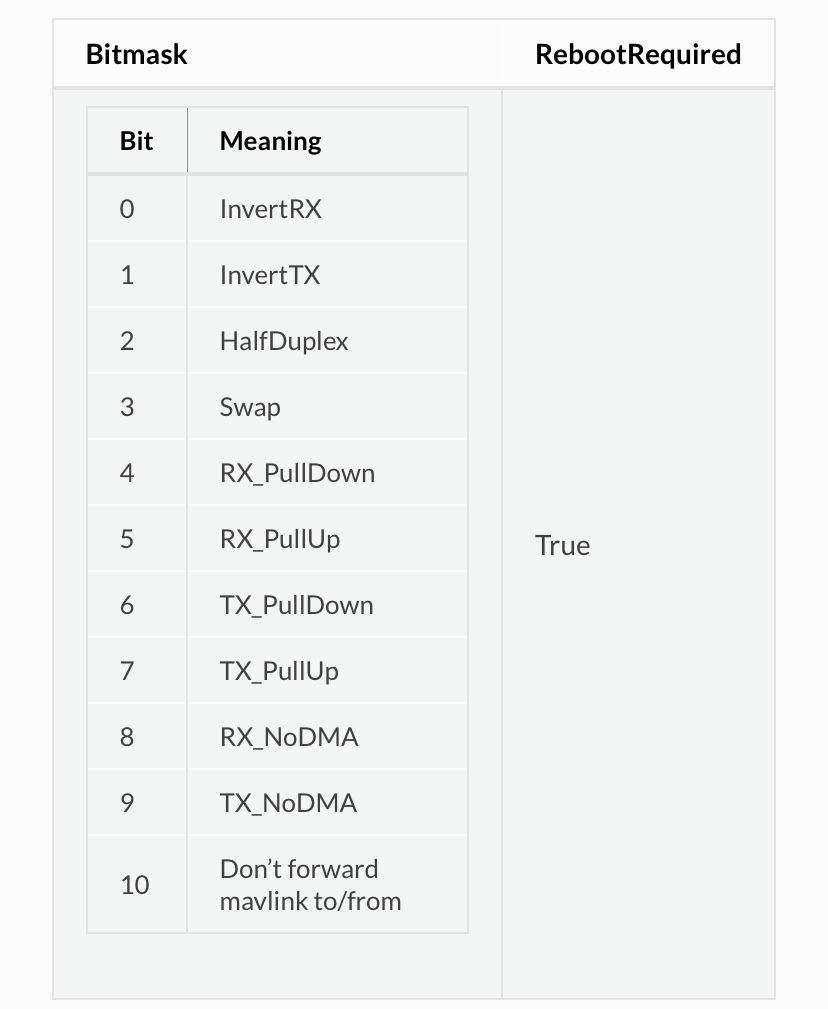
you need to set only one thing: SerialX_options: 37 (IBus telemetry).
It is confirmed working with Flybus I6x and IA6B receiver.
for the flysky I6 and I6X there are optimized firmwares to show the telemetry. Look to the github of qba667
Thank you for the info. I understand now that the pull request for IBUS telemetry and the being able to use IBUS as an RC-Input while connected to the TX pin are different. But would you happen to know which SERIAL6_OPTIONS flag will allow my configuration to work?