I m building a new quad with kakute F7 aio
I want help for how to connect the wires to uart ports of kakute
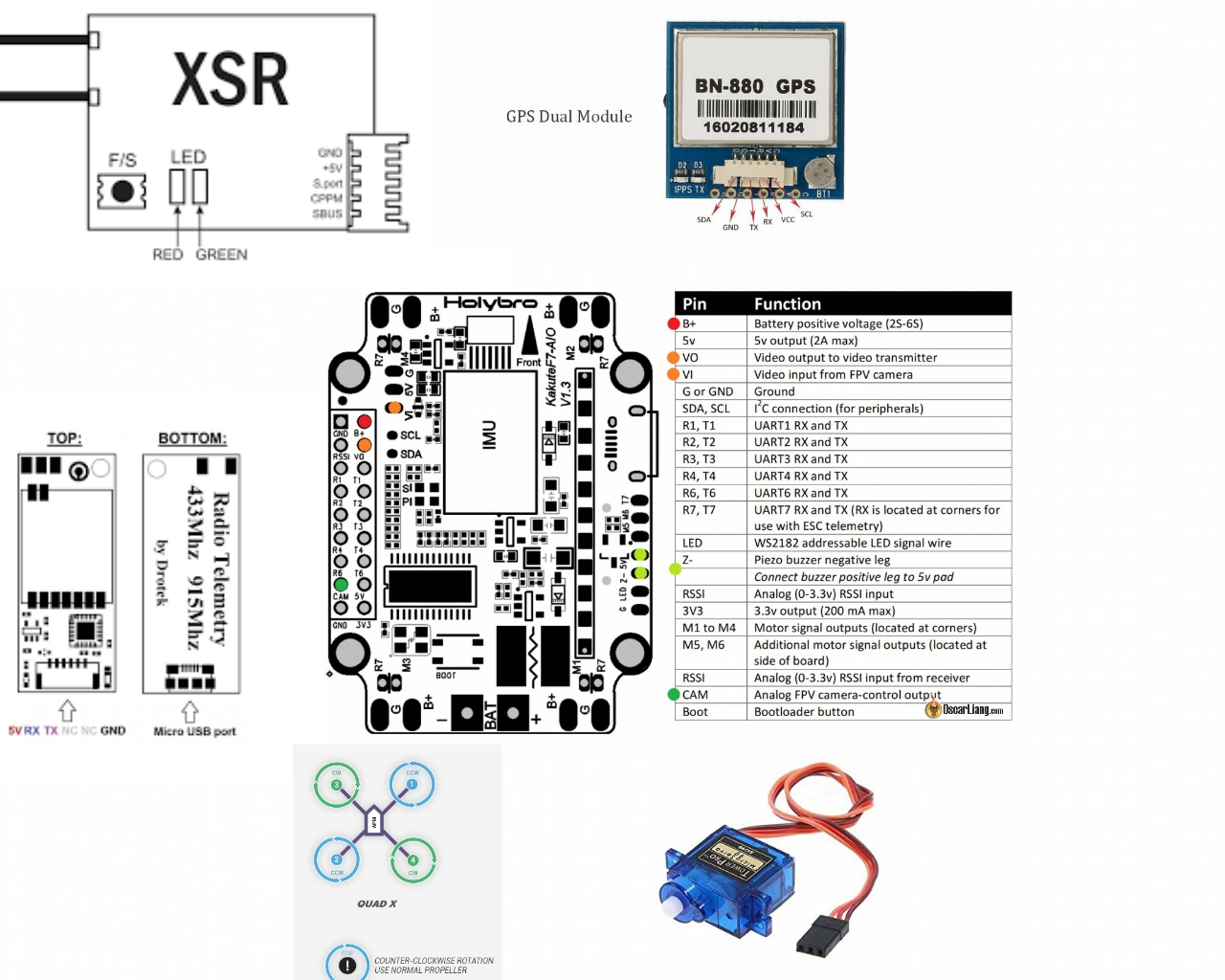
Here are the the hardware I am going to use
I m building a new quad with kakute F7 aio
I want help for how to connect the wires to uart ports of kakute
Here are the the hardware I am going to use
It’s detailed here:
You may have to change the Motor output channels in Ardcucopter but this is simple. Run the Motor test function and adjust as required.
What’s the servo for?
The connections for tx and rx are vice versa?
The servo is for fishing
Bait release
Here is a test with my coaxial x8
Not sure what you mean by vice versa Tx/Rx.
Got it with the servo. Very cool.
Thank you
That was what I need!!!
Post another video when you get it dropping bait Dimitris!
I will when the new quad with chibios is ready!!!
Thank you dave
Test it properly first, if you use dshot - do plenty of tests to make sure dron is not doing twitches as if motor loses command stream. I had it on several models and had to make custom hwdef with nodma added to all uarts. But, it may have been chip or my build only glitch. Just test it. If it happens - it is impossible to miss, during autotune or alt hold loiter it will act as if it temporarily lost a motor.
Thank you for your help Paul
I m going to use Hobbywing xrotor 40A
I don’t know if this esc support dshot
I upload the dev 3.7 on the kakute
I have connected the receiver gps and tellemetry
Everything working as it should
The pass through tellemetry on taranis also works
Now I have to put them on the copter
The build has completed
It’s a bait drone!!!
Kakute F7 AIO
Sunnysky 4010 450kv
6s
Hobbywing 40A ESC
200m of line, nice! These are great applications for multirotors.
It could go far more but we didn’t have more rope for the bait