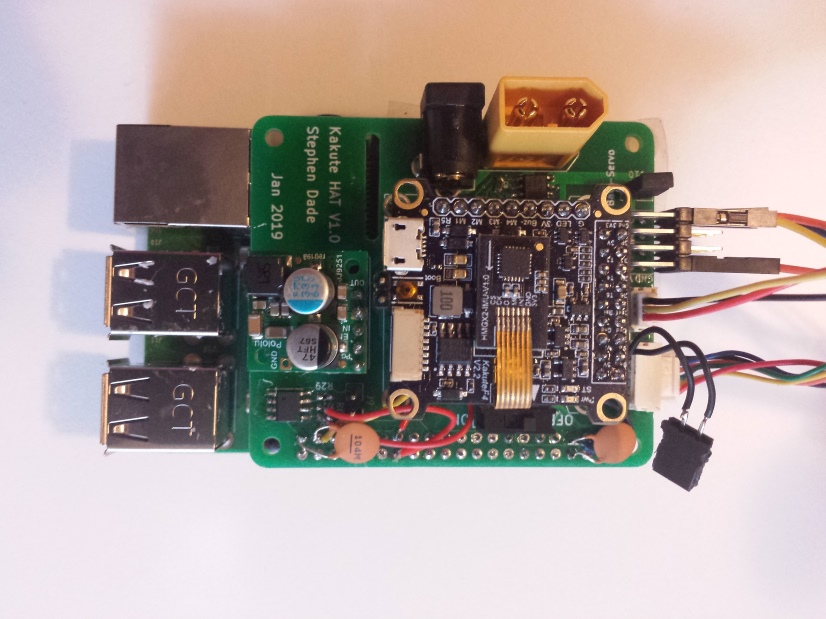
As part of a larger project to create tiny indoor rovers, I’ve designed a Raspberry Pi HAT to interface with a Kakute F4 (non AIO version).
It contains:
JST-GH connectors for GPS and RC
4 motor outputs
UART telemetry connection between the Kakute and Pi
DC Jack for powersupply for both Kakute and Pi
Full 2.5A power supply for Pi
Cutout for Pi camera cable
Current sensing
Managed power on/off switch for the Pi, so the Pi will cleanly shut itself down before cutting power (no more corrupted SD cards!)
The next stage is to tidy up all the wiring mods in V1 of the carrier board and clean up the design a little.
6 Likes
khancyr
January 28, 2019, 11:28am
2
Excellent !
Ping me if you want to launch to produce a small batch of hat, I would be interested to buy one !
rmackay9
January 29, 2019, 12:00am
3
Looking cool! Great to hear that it’s for a rover!
1 Like
That’s the plan! If I get enough people interested it should make a small production batch practical to organise.
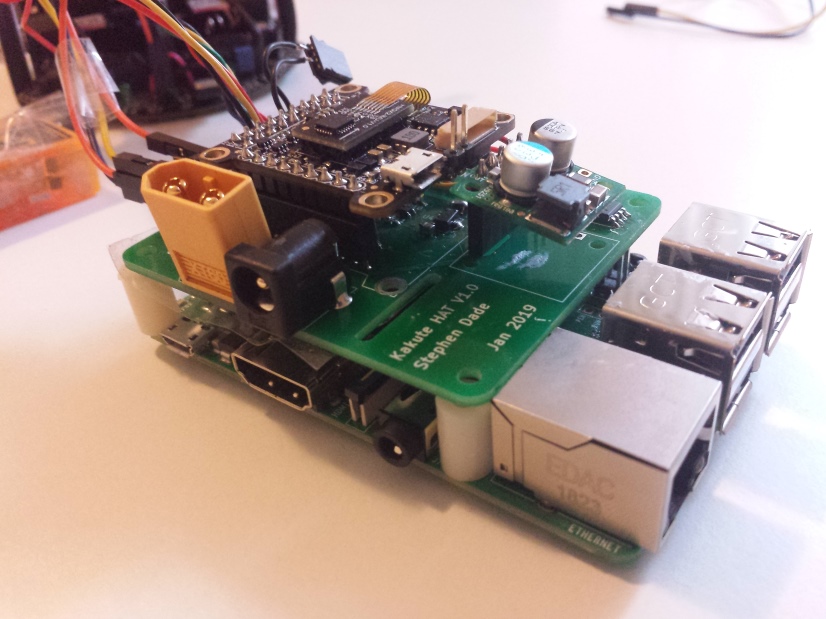
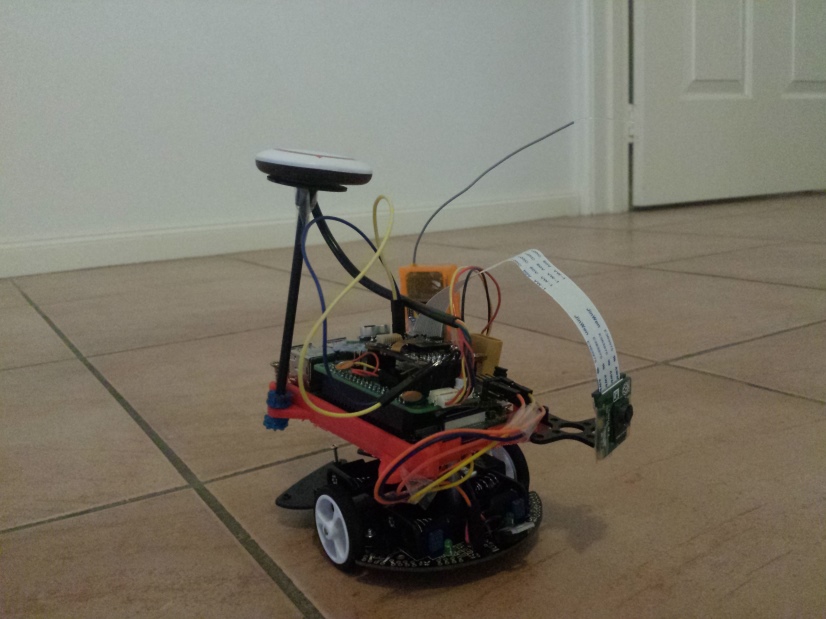
I’ve got it mounted to a Polulu 3Pi at the moment:
Only issue so far is that since the Kakute doesn’t have any AUX ports, I can’t use the MOT_PWM_TYPE=3 for brushless DC motors. So I repurposed the Arduino on the 3Pi into a simple ESC.
It’d be cool if the AUX channels were just another SERVOn_FUNCTION so it could be mapped to any output port. It’d make it much easier for the smaller boards to be used in brushless motor rovers.
LunaX
February 4, 2019, 11:51am
5
uh, sounds good
The PCB is still a work in progress … I still need to fix up a few misplaced traces on it!
I’ve actually separated out the power module part for the Pi to make a standalone power/telemetry interface - I’ve posted some details of it on the Ardupilot Facebook group.
LunaX
February 6, 2019, 7:10pm
7
nevertheless if pcb is ready for “ordering” - i’m interested in it
I should be able to have something priced up by the end of the weekend… I think @khancyr was interested too.
tiffo
February 8, 2019, 2:54pm
9
That would be perfect on my donkeycar for my ros videos! Keep us posted
ktrussell
February 8, 2019, 2:58pm
10
I am interested as well in a carrier board. I have several rover projects in mind. Currently I am using a Pixhawk 2.4.8 but need to research what would really work best. And I definitely need a coprocessor (R-Pi or other) to send some commands to the Auto Pilot over MAVLink and perform some separate functions. I have not researched the options, yet, but it seems I need to consider the Kakute.
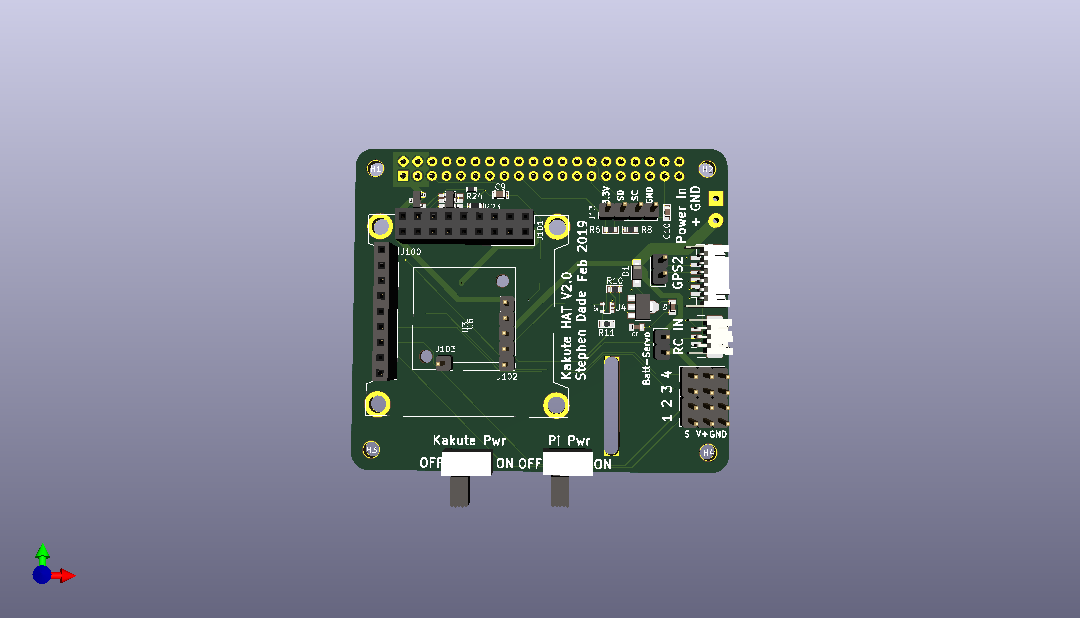
Ok, I’ve made a few changes to the board:
(Note the Servo output ports will be horizontal, rather than the vertical shown in the renderings
So it now has:
Separate power switches for the Kakute and Pi
Removal of current sensing (sensor was quite expensive)
I2C port breakout (from the JSH-GH port. The Kakute has it’s I2C port in an odd location, so the user will have to solder that themselves)
All ports face towards the USB-port side of the Pi
The Kakute’s USB port is accessible
Fixed up incorrect traces
Removed the ID EEPROM, as I’ve not quite worked out how to use it
Barrell Jack and XT60 ports replaced by solder pad, so the user can attach any power input plug they want.
Doing a small production run:
I can build these for roughly $40AUD per board. If I get more than 10 orders, I may be able to reduce the cost a bit (bulk discounts for parts, etc).
Postage isn’t included. It’ll likely be $20-30AUD depending on which country you live in.
If anyone wants a board, PM me with the quantity and country of delivery by 20/02/2019
1 Like
Just a reminder to anyone who wants a board - PM me by the 20th Feb so I know how many boards to build!
dkemxr
February 15, 2019, 4:04pm
13
This would seem to address the PWM type problem if it makes it into Rover. Very nice looking board BTW!
MOT_PWM_TYPE controls PWM signal type to different motors. This includes DShot, "RC PWM", and brushless PWM (duty cycle). We don't have...
AllVehicles
DevCallTopic
Library
too late for ordering one?
For this production run, yes. I ordered the parts several weeks ago.
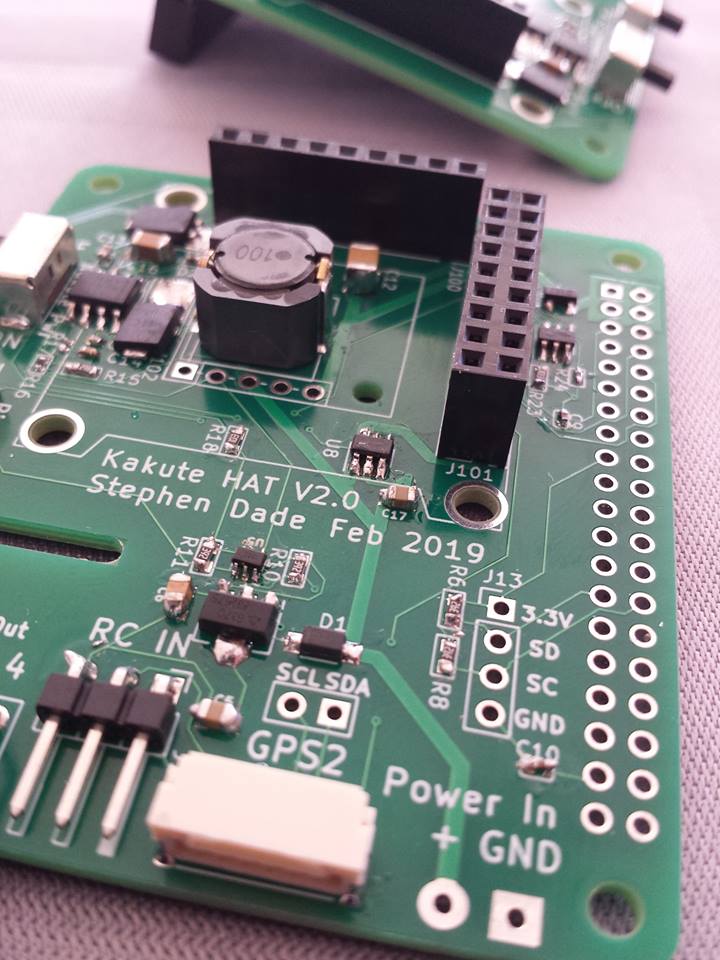
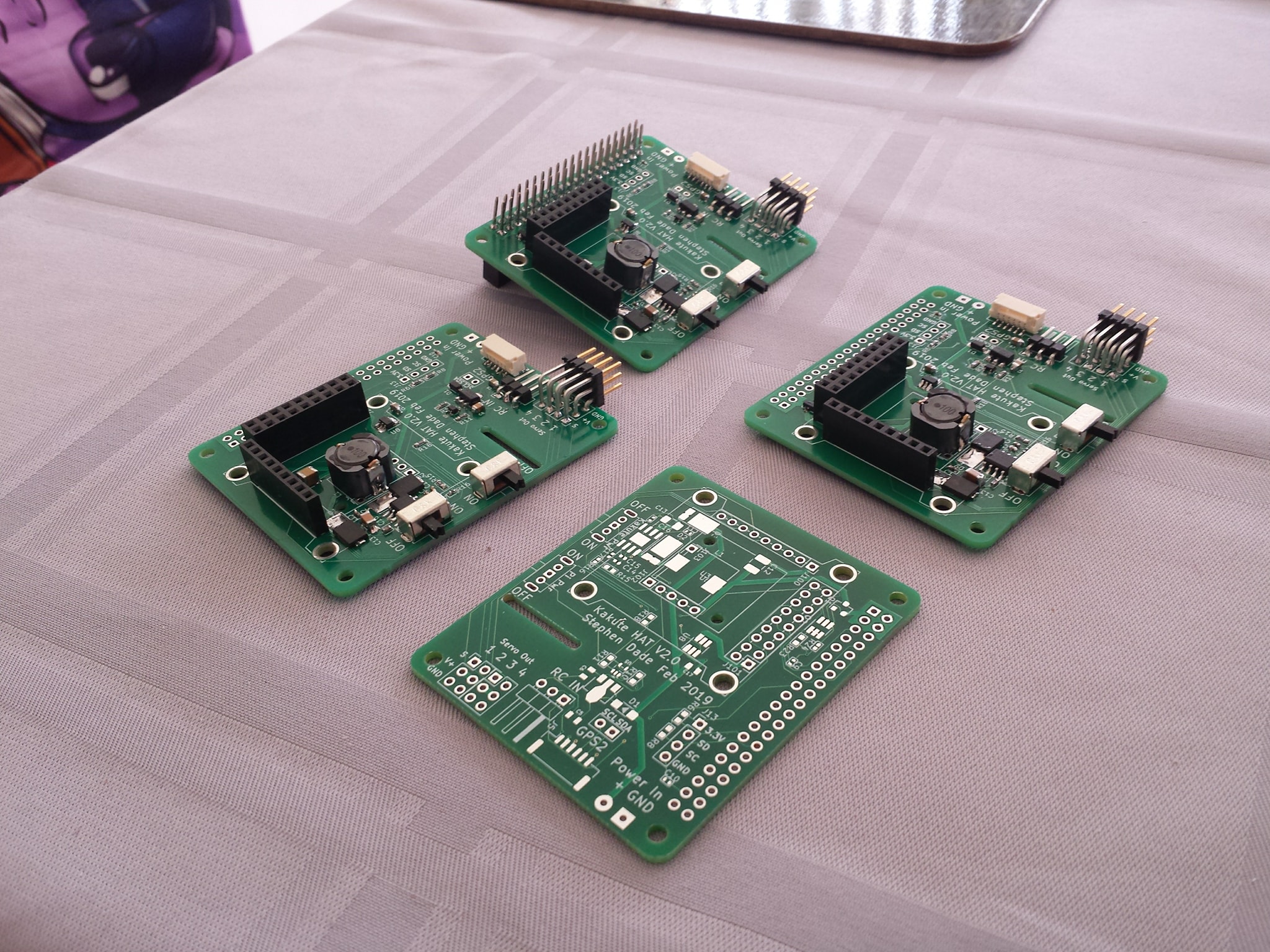
Small update, as I’m assembling the V2 boards:
Assembly is going well for this batch - only 1 incorrect part footprint on the PCB! Easily fixed fortunately. Once complete, I’ll be testing the boards and then sending them out to everyone who ordered one.
Also, whilst testing I’ll create some documentation on how to use/configure the boards.
1 Like
For all those that got their boards, here’s a copy of the user manual:Kakute HAT Expansion Board V2.pdf (585.9 KB)
I’ve also made a ready-to-go disk image for the Raspberry Pi: https://drive.google.com/open?id=14CSzmFs3juZkNQbGRObfQGECXYbo7_M9 . The image is a simplified Apsync software package, with streaming telemetry, a Web GUI and streaming video. Full details and scripts are at https://github.com/stephendade/apsync-Kakute
(The image will also work for Raspberry Pi’s without the carrier board, for those interested!)
LuisVale
April 25, 2019, 12:45pm
18
Congrats @stephendade
It looks like a very nice work.
ktrussell
April 28, 2019, 3:45am
19
I have received mine. Looking forward to trying it out when time permits. Thank you for making these available.
bys_1123
April 28, 2019, 7:36am
20
Wow, very cool. Thanks for sharing.
 - is this hat pcb available?
- is this hat pcb available?