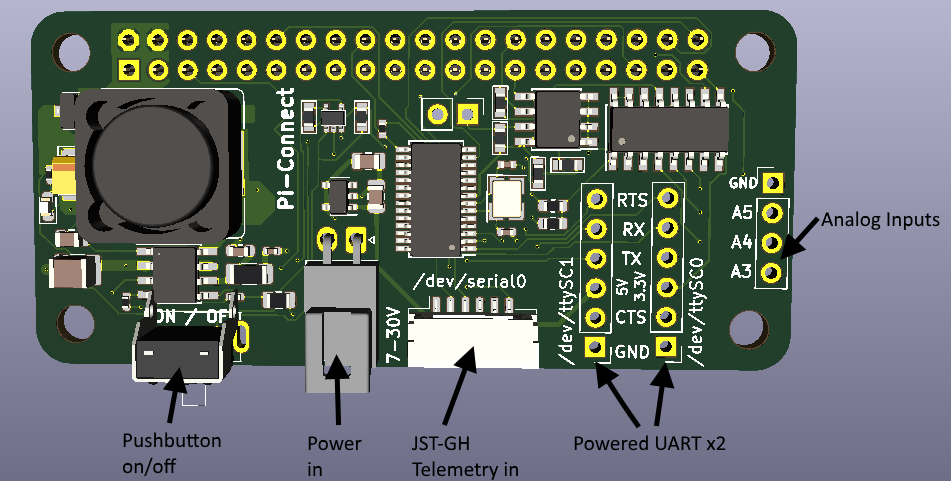
5.1 / 3.5A power supply for the Pi (takes in 7-30V input via a Molex Nanofit connector)
JST-GH connector for connection to flight controller telemetry port (though I can provide a JST-GH to DF13 cable for Pixhawk users)
2x powered UARTs for connecting to other devices on the vehicle
ADC for voltage monitoring (2x used for board voltage rails, 3x spare)
Overcurrent and ESD protection
Fits the uHAT specification (size and screw holes match a Raspberry Pi / Zero)
It doesn’t require any special software or drivers on the Raspberry Pi - just a few extra lines to /boot/config.txt. However, I am creating a small web interface to manage the telemetry streams, network and analog ports.
I’ve launched a small Indigogo for the board so I can do a small production run (plus board certifications). So if you’re interested, go to https://igg.me/at/piMdxRo2YBg/x/2660470#/ to order a board!
The Web GUI I’m developing uses node.js, so not directly compatible with AP_Web. However, it (the Web GUI) should be able to run on any Linux-based companion computer, so it won’t be locked to my board.
Once I’ve got my Web GUI code cleaned up and stable, I’ll release it under the GPL anyway - so anyone will be able to use it. Intent is to make it fairly generic, with sub-pages for network management, serial port management, analog port viewing and system status.