hi everyone,
I’m using K++ flight controller for my hexacopter in which im facing drifting(yawing with roll) issue and the DRONE takes less of my control. It is good till i give throttle up and when give throttle it is moving in forward right direction and flips off. I tried several log analysis like mission planner, UAV log viewer, Airdata etc. But i cant open the log file (.bin file). is there a way to analyze this file. I will be greatful if anyone can help me to solve this issue.
thank you in advance
Jiyi flight controllers are not supported with Ardupilot - they have their own software
thanks @xfacta may i know which software can i use to analyze these data
No idea, you will have to find the Jiyi web site and research what tools can be used or contact their support.
It is not an open source flight controller or software and there may not be a support forum as far as I’m aware.
thank you @xfacta i will continue my search for it.
if anyone else know about it kindly let me know
JiyiFC does not have their log viewing software on their official website, and their official website is missing a lot of things. If you want this software, you can request it from them via email or WeChat. I have this software, but my computer is not allowed to connect to the internet, so unfortunately I cannot share it with you.
If possible, and I mean if possible, I suggest you switch to an FC based on the Ardupilot firmware. If you can’t do that, please ignore my suggestion.
There are problems with the logic of jiyiFC, and I have encountered the following problems when using this FC:
- Blindly following the position of the GPS or RTK module, I guess there is no EKF inside
- When switching flight modes quickly, it may switch to a mode you have never set
- If the WP you import is a straight line, you will not be able to import your WP
- Must be connected to the internet to upload WP
Thanks @Ben_bili for your suggestion. i will ask Jiyi for this, if anyone having that software kindly share with me (if possible). it will help me a lot
Hi, Can You advise me some way how to set Ardu Pilot to flightcontroller K++, if it is possible? Thank you)
It is not possible to use the Ardupilot firmware on the Jiyi flight controllers
1 Like
@ganesh538 use agri assistant software or go to the “download manual” section in jiyi website and select k++ you will find all the necessary info
I have done this. When I want to compare the flight performance of K++ and Ardupilot,.
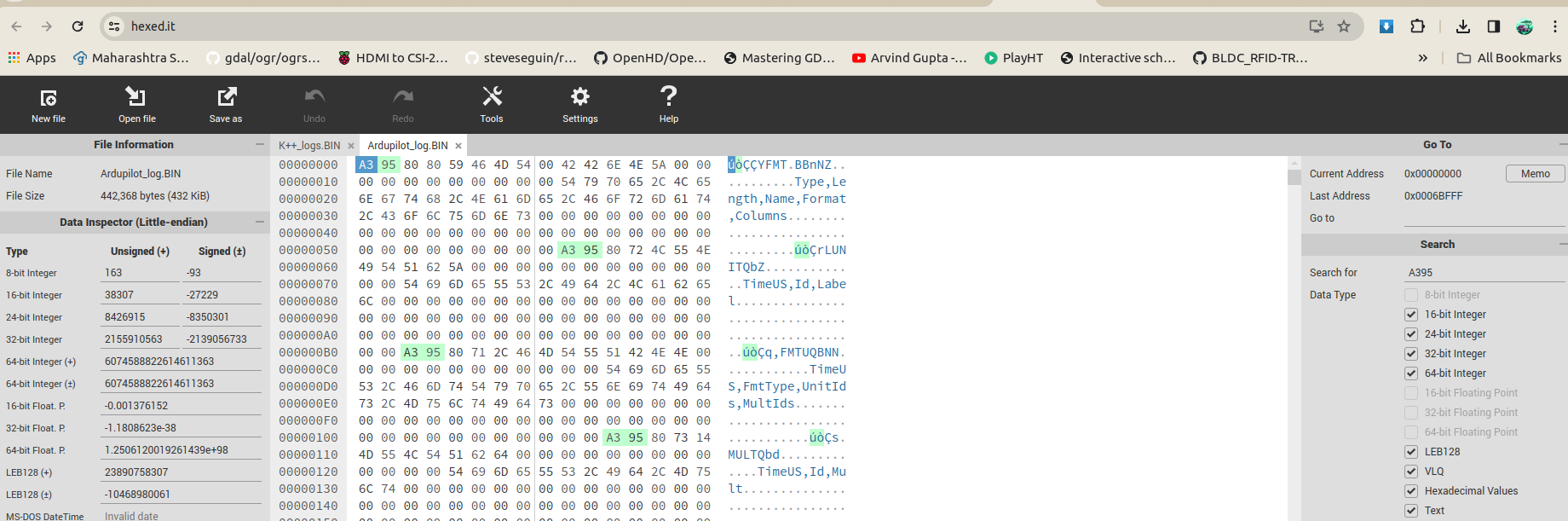
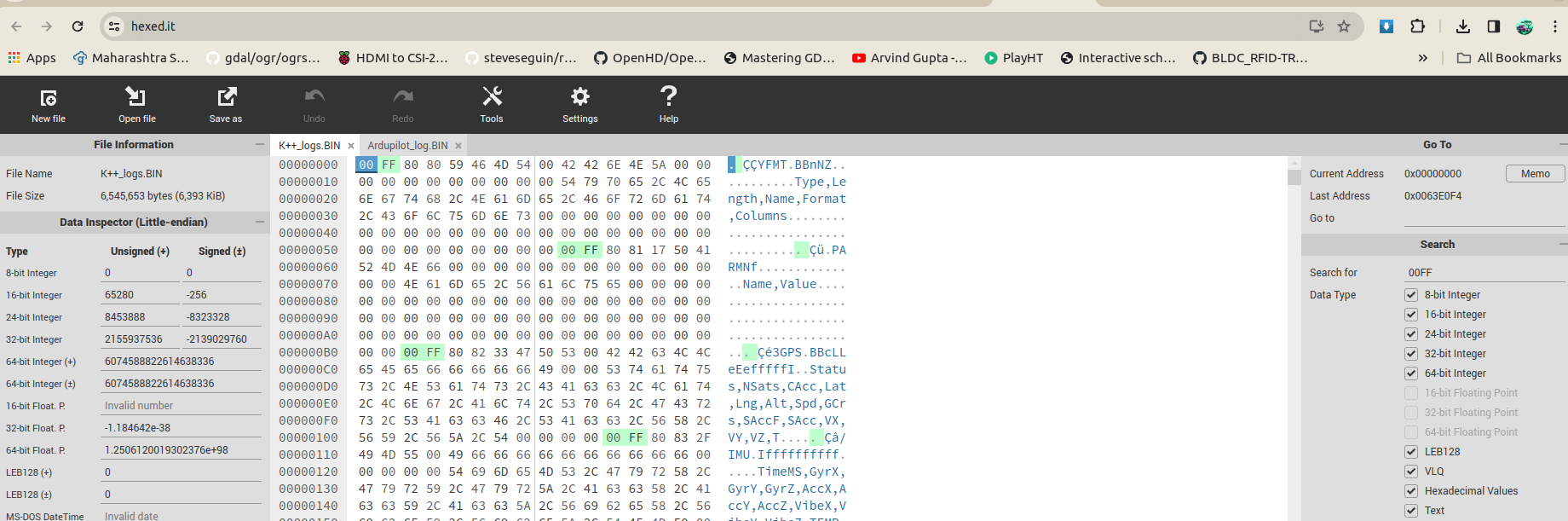
There is only one difference in the K++ log file; they have just changed the start bytes of every message. The rest of the log file is the same as Ardupilot (as K++ used old Ardupilot firmware around 4.0.3).
Clone APM Planner from git and change s_StartByte1,s_StartByte2 to 0x00, 0xFFin source code and compile it. The log analyzer is now able to parse K++ log files. (You need QT setup to compile the APM planner.)
Following is the difference between log files.
3 Likes
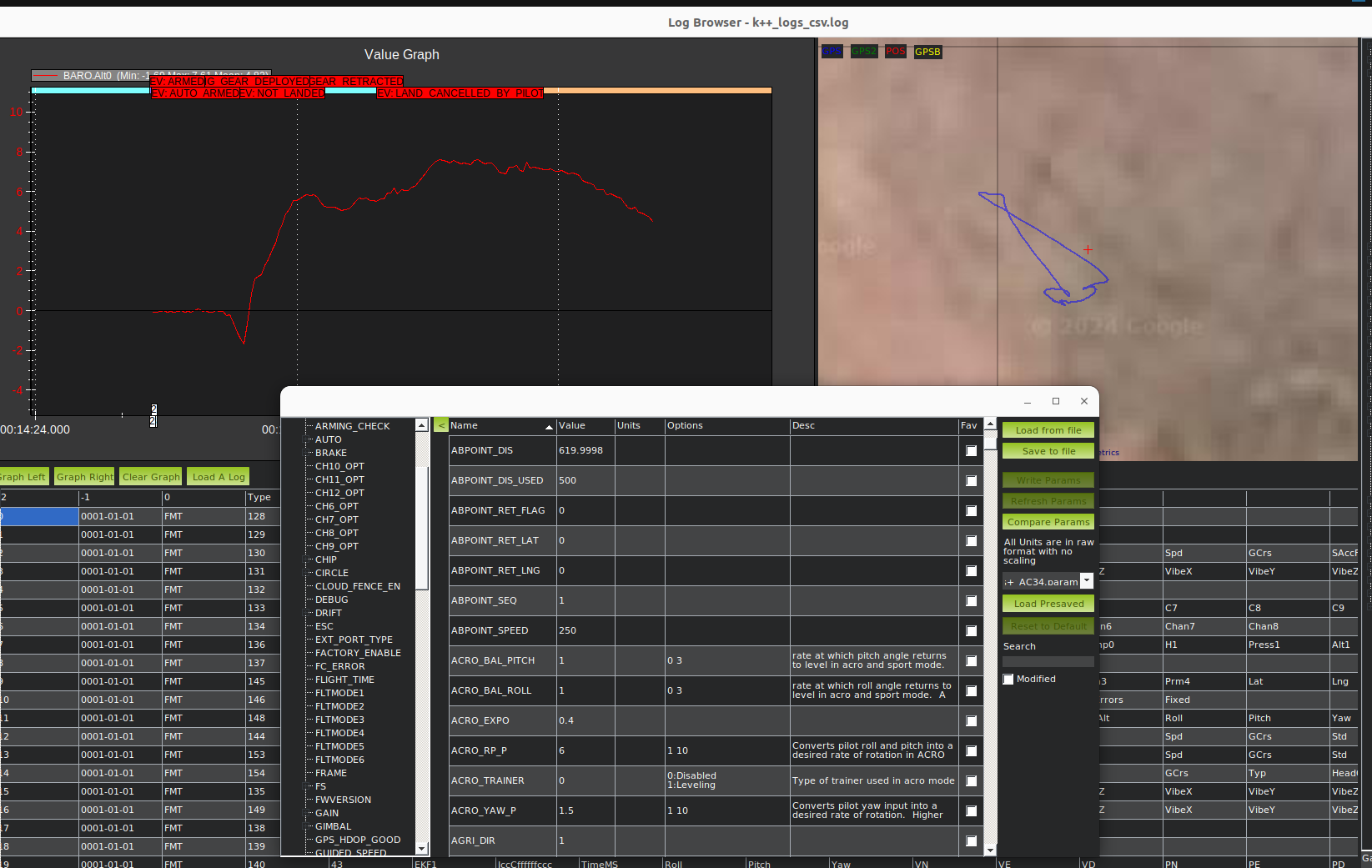
Here are some decode logs of K++ v2 board along with its PARAM data.
k++_logs_csv.log (781.9 KB)
2 Likes
hi dear Ben,
have you any information about the K++ hardware and PCBs?
Hello
Could you help me in reading logs for k++ log file? . After changing the start bytes and trying to build through QT Creator i am getting a lot of errors.
Hello ben, I want the software for analyzing the k++ log. So can you share me the mail id,so that i can request you for the software.
Not much but know bassic architechture. K++ uses STM32F4 and STM32F103 chines clones. and generic Ardupilot supported sensors. Their sensor vibration damping is very good then other flight controllers.
Sorry for late reply. I can share exe for this. let me know if you still wants.
hi @Dhananjay_Khairnar , may I ask for the software?