yes, thank you! That is very helpful
2 Likes
@stretch1100 that pdf shows this for the MCU in the Jumper:

that doesn’t match the 256k from the comment you found. It does match the STM32F405 (which has 128k base ram and 64k CCM, so total 192k)
I still suspect there is something odd about the CCM memory though, but it would be great to get a detailed reference manual. I wonder if CKS even make proper reference manuals?
I also just tested with it set to 256k ram at 0x20000000 and it doesn’t work.
3 Likes
@Bastelfuzzi did you find the correct target to update the firmware?
Want to formulate an email and we can translate and send to them to ask specifically what you need to know for the chip? Looks like their email address is wangb@cksmcu.com.cn
1 Like
So the wiring diagram in the aliexpress page is erroneous too.
The crossfire link is Gnd - VCC - RX - TX there. The same as in the receiver, so the RX goes to RX and TX to TX.
They must be crossed and as it seems to work for you I assume the wiring diagram is wrong.
1 Like
The labels on the receiver are “FC TX” and “FC RX” to indicate which flight controller pins they connect. As I mentioned, the image was taken from the ELRS Receiver Wiring page. I debated changing the labels to indicate the function on the receiver but I thought the “FC” prefix used by the ELRS page was OK. I copied the same labelling for my photo.
My main concern was the red ground wire on the Jumper hardware. I didn’t want anyone to blow up their alternate receiver by assuming the red wire was power.
I believe the “FC” prefix makes the wiring diagram correct.
“FC Tx” is the receiver’s RX pin and “FC Rx” is the receiver’s TX pin.
2 Likes
Hello everyone
I just got mine and, after reading this thread, I’m still unsure if I should add a compass.
Anyway, I did replace the GPS with a BN280 with a compass but couldn’t enable it. Is there anything else I should do beyond wiring SLC/SDA and enabling the USE_COMPASS parameter? I did that but it wasn’t detected.
Also, should I keep the original firmware or upgrade it?
Thanks in advance.
Thanks for the awesome explanation because I have one of these and you are ![]() % correct about flying in any winds over 5-10mph the Transition from qhover to fwba is really difficult to gain stable control and I have been trying to figure what is causing this and was considering on adding the Mq-5883 dual Gps/mag to see if it helps but you are saying it doesn’t so I guess changing out FC is best option? Thanks for the explanation!
% correct about flying in any winds over 5-10mph the Transition from qhover to fwba is really difficult to gain stable control and I have been trying to figure what is causing this and was considering on adding the Mq-5883 dual Gps/mag to see if it helps but you are saying it doesn’t so I guess changing out FC is best option? Thanks for the explanation!
2 Likes
If anyone wants the Xiake model icon ,its now available on SkyRaccoon:
6 Likes
Hi @tridge
How did you manage to get the compass to work? I replaced the GPS with a BN280 which has a compass, hooked to the I2C but the compass wasn’t detected. Do I have to upgrade the firmware? I tried your’s but it fails to get the parameters.
Thanks in advance
3 Likes
Not, with a servotester, but I switched several times up and down - unobtrusive.
I recommend a simple servo tester. The servos on my three Xiakes were all fine…
1 Like
Since it is a CKS32F405, I will not update it , but rather replace the FC to avoid a crash.
1 Like
Thank you… may do the same.
1 Like
Would a genuine STM32F405 be a drop in replacement for the current chip? Depending on how adventurous I feel, I may try to swap the chip. Am I correct in assuming the pinouts would be compatible?
Thanks for all the great information.
1 Like
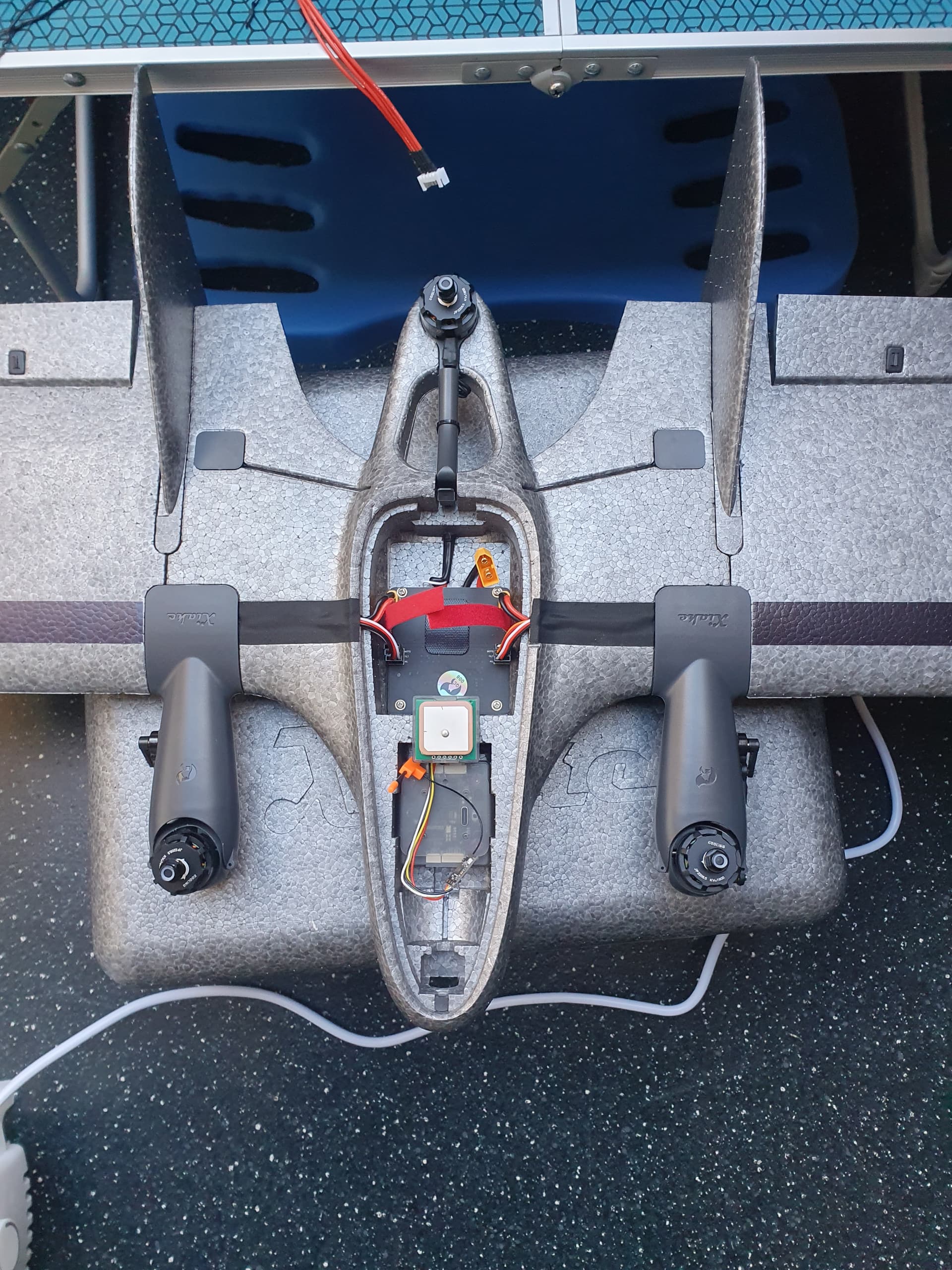
Hallo i am new. I got receive the xiake 800. I have not tested yet, but is it normal if the plane in stab. hover mode that the two motors at the front not equel vertical? You see the left motor is little bit more forward than the right motor. grtz Peter
1 Like
Some LOS flight testing today.Think I`ll try manual mode instead of cruise.

3 Likes
The link has sadly expired. Anyone still has the file of the canopy?
Is this the canopy you are looking for?
There are updated versions and a mount for Matek F765 (partly pla & tpu). I will upload tomorrow the files…
1 Like