No flight log but for a first autotune I do them individually.Roll first,then pitch,then yaw.Once it’s done one full tune a three way autotune should finish in a few minutes.I think my third or fourth autotune took around 6-7 minutes.
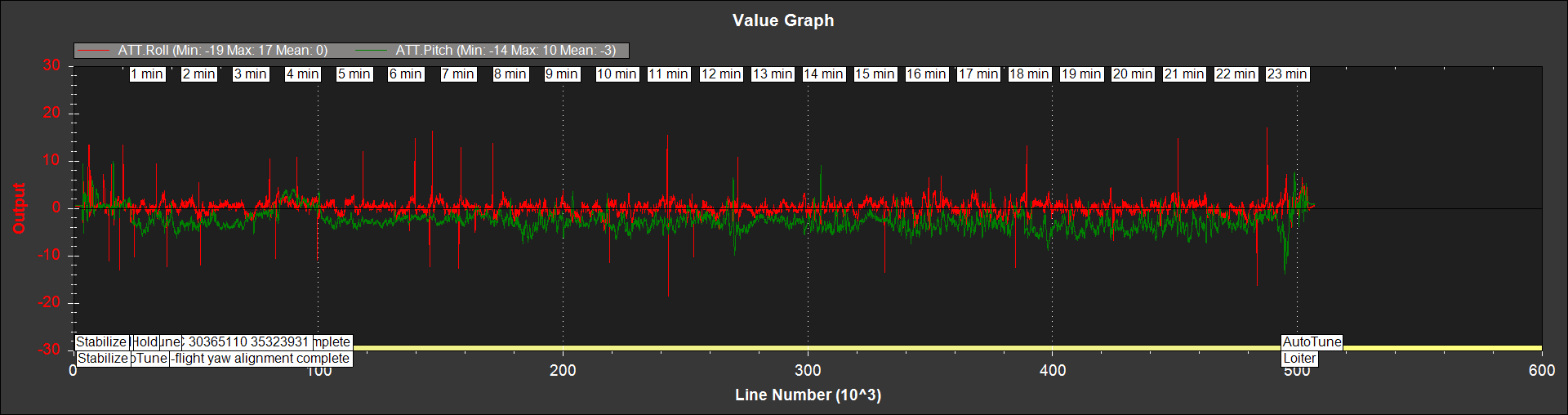
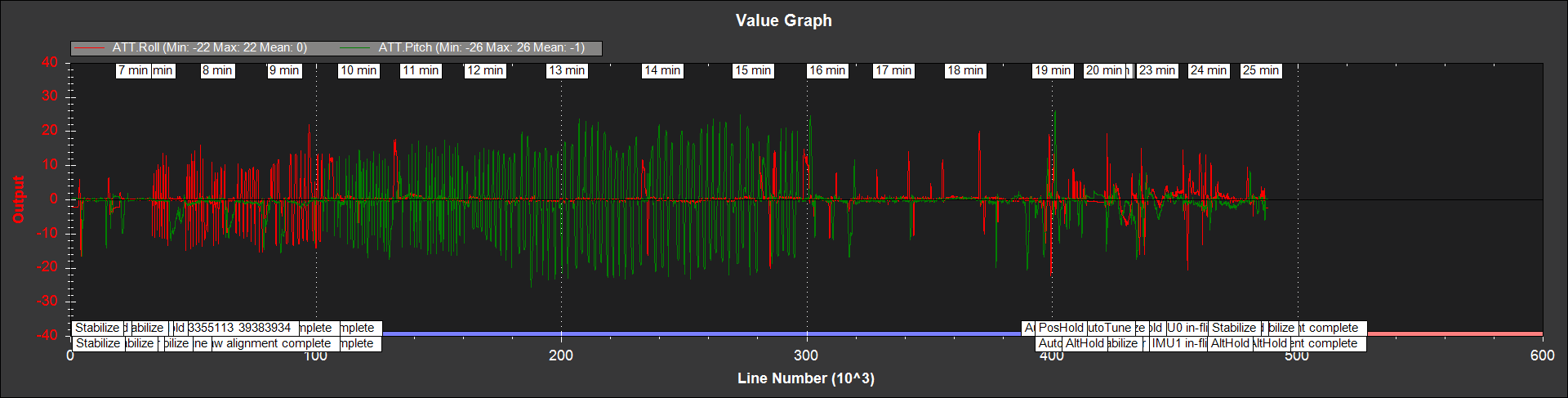
Although it says autotune is engaged as a flight mode nothing actually happens.Most of the time that is because the throttle is not exactly centred.Your throttle was just above 50%.Whether it’s enough to stop it engaging I can’t say.Dead zones etc will have an effect.
The autotune starts doing it.
It seems as if it started and stopped in an infinite loop.
Hopefully someone who understands more than I see something in the log.
Thank you very much for your help.
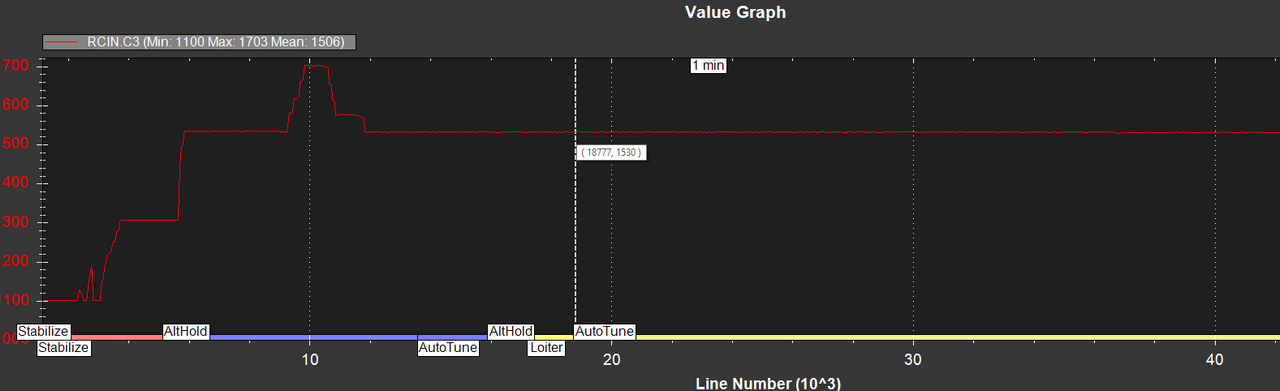
That’s wrong.Try again with the throttle exactly centred.This is from your log showing your throttle was outside the dead zone ( +/- 15 ) so autotune would not trigger.Your’s was at +30.
What is the parameter to increase the zero zone of the accelerator.
I think it will be the best solution until I discover why my accelerator is not centered.
Are you sure you deselect yaw and pitch in parameter list, set alt-hold as the flight mode for autotune in order to make only roll axis? And you say this takes more than 20 minutes!!! There is something we are missing here
I just noticed - do you have a sprung centred throttle ? If no then you need to redo the radio calibration and lower the throttle all the way for the final write.The throttle trim should be very close to the lowest throttle figure (1101) not at the mid point (1506).Also check that you have no trim applied on the radio itself.
I do not understand the question.
Sorry for my bad English.
It means if I mount pixhawk 2.1 on anti-vibration platform?
If mounted on an anti-vibration platform.
Why do you ask that?
Many vibrations in the log
Today I did the auto-adjustment and the problem was the station.
But very bad result autotune.
In pich 0.18 and roll 0.03.
I put manually rolls at 0.18 to make it stable.
After flying in loitering with 18 satellites and 0.7 hdop hera very unstable.
I do not know what to do.