I am new to the community and I am having some issues setting up my skidsteer rover. I am unable to get the skidsteer steering to work. I don’t think the motor tests are performing correctly. I am currently using the Flipsky FSESC 4.12 ESCs to control the motors. They are plugged into the PWM channels 1 and 3 which connects to the I/O PWM OUT [MAIN] of my Pixhawk 6C. In the parameters I have set servo 1 to left throttle and servo 3 to right throttle. ParamList_rover.param (22.0 KB)
Additionally for my controller, I am using the FlySky FS-i6X. Currently it is in Stick Mode 2 with 2 Mixes. Mix 1 is set at Master: Ch1, Slave: Ch3; Pos. mix -100%, neg. mix -100%, offset 0. and Mix #2 is set at Master: Ch3, Slave: Ch1; Pos. mix 100%, neg. mix 100%, offset 0. I think this could be causing some issues but I am unsure what I should do instead. This set up allows for easy use when the ESCs are connect directly to the receiver channels 1 and 3.
I am currently testing inside so the GPS isn’t working but here is a log of it running. When running the motor C test, both sets of wheels started spinning and would not stop when motor test “stop all motors” command was run. 00000045.zip
Any advice on how to fix these issues would be appreciated!
There much realy good and important informations.
Don’t use any settings like trim, mixer, programming on your RC-transmitter. All configuration is only done on the FC.
+1 on no mixing on the RC
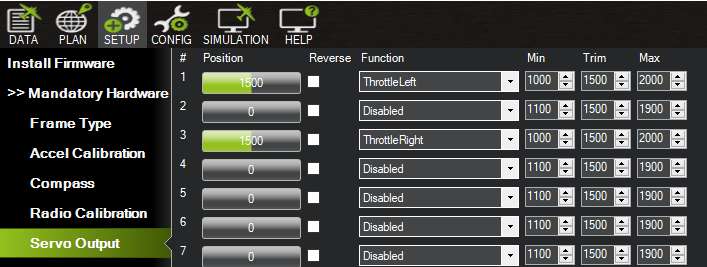
using mission planners radio setup and Servo output pages you can see what the flight controller is receiving and how its driving your channels 1 and 3.
I just fired up Simulation (SITL) and could see skid steering working when i loaded the skid-steer rover model.
Thank you so much for the input. I am out today, but I will update when I get the chance to change these settings.
As for the PARAM-file, I just uploaded the ParamList that Mission Planner created for me, is there a better way to do this in the future to include all the necessary data? Or were my parameters(servo1 and servo3) not written correctly to the Pixhawk causing errors?
To send this list is OK. But is it the actual list? If yes than do the setup again. If you change parameters on the Mission Planner screen you also have to write them to the FC. Than reload the parameter from yor FC and send this file
I was able to troubleshoot more today. My main issue was that the ESCs were not calibrated correctly. My other big issue, was as you said, I needed to turn off the mixing within the controller.
Once I recalibrated the ESCs in the VESC software and turned off the mixing, I was able to get everything working correctly!
Now time to test outside and tune everything properly!! Thanks again!