Hi
Today I was testing a assembled system of Foxtech (co-axial quad) and it was my first flight. I started by calibrating all the sensors and performed all the prearm checks. I tired poshold first, just to be on the safer side but the behavior was abnormal, and got below mentioned logs.
Then I tried stabilize and it got stable after few seconds but then it ended into a crash after wobbling. I got logs for 4 tests, but after that I didn’t get anything. I was using pixhawk cube orange. I have mentioned the video link of stabilize mode and log of poshold.
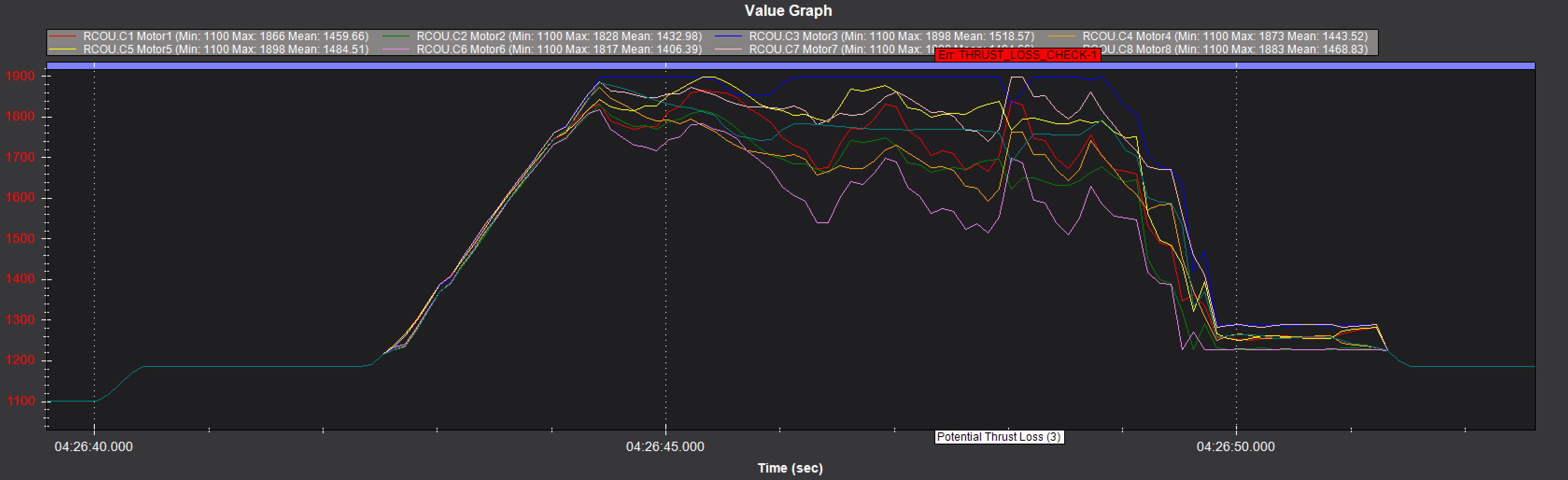
Not much to go on with this log, is it the same log as the flight in the video? Because this shows motor outputs at max and thrust loss errors typically meaning underpowered/overweight. Describe the components on this craft and it’s take-off weight with the battery.
You should be testing initially Stabilize mode.
And there is no current logging.
- There are two different things, video is of stabilize mode and the log is of pos hold mode.
- I had wobbling issues in pos hold mode as the PWM output of the motors was not sufficient (according to my analysis).
- I tried stabilize mode after flashing the cube but the wobbling issues were still there and I didn’t get any logs of that flight.
These are the issues that I faced during testing.
If that’s all you have to add then it looks like it’s underpowered. As suggested:
“Describe the components on this craft and it’s take-off weight with the battery.”
Position Hold mode is essentially deprecated and replaced by Loiter several years ago.
There are just basic components-
Propulsion system, avionics including cube orange FC, here 3 gps, one PDB.
There was no payload attached to the system.
Underpowered fact is considerable, but I didn’t get any logs of around 5 tests. Any particular reason for that?
Hi
Can anyone please help with this issue?