Hey all,
I’m having trouble getting the aircraft to settle down calmly when it touches down after completing an AUTO mission. It touches down, then attempts to takeoff again, usually pitching back but this might be due to wind. This results in me switching to QHOVER and manually disarming the aircraft. I need help troubleshooting this to have the aircraft land reliably and switch off its motors.
Here’s a video of what it looks like:
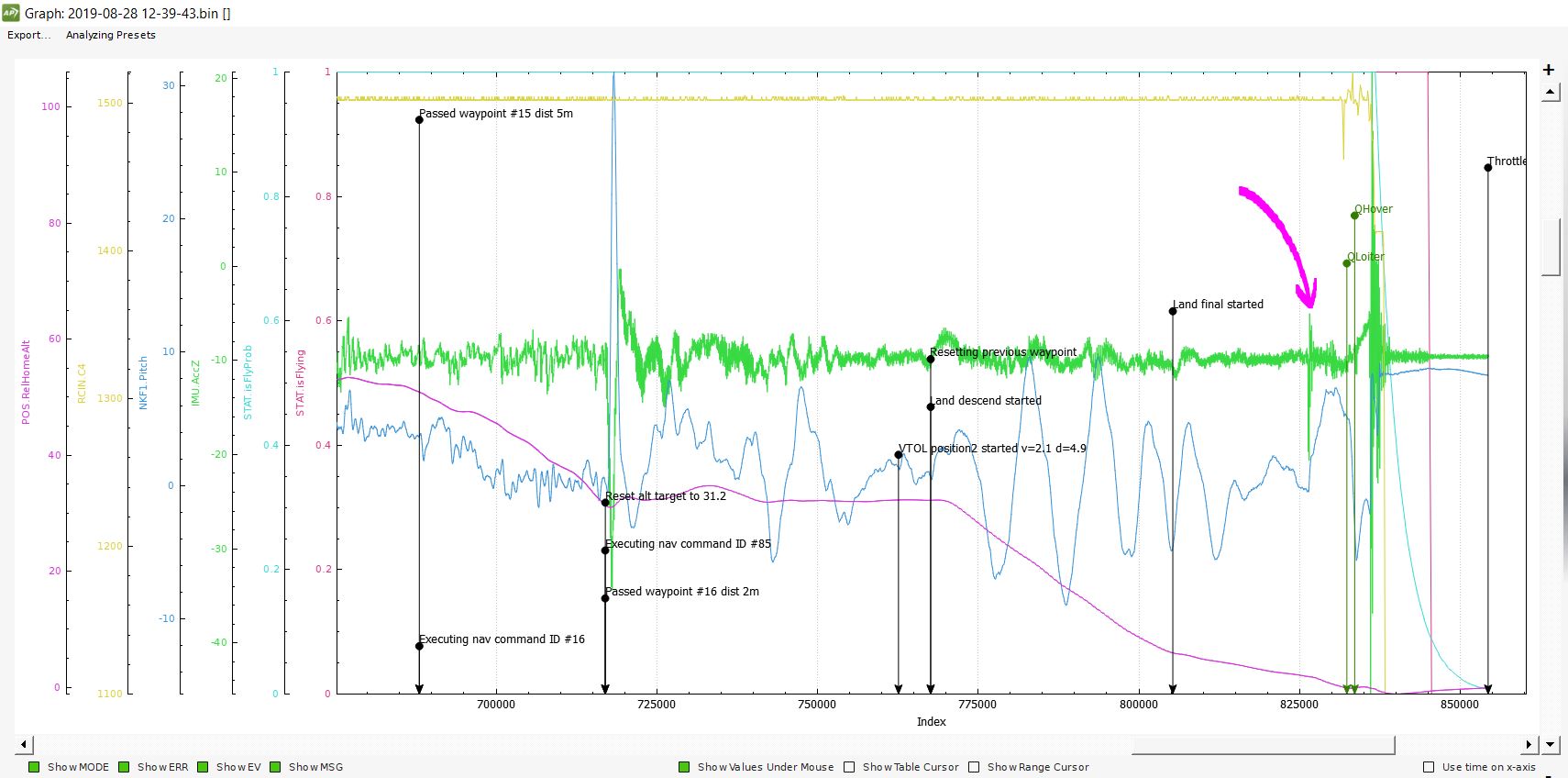
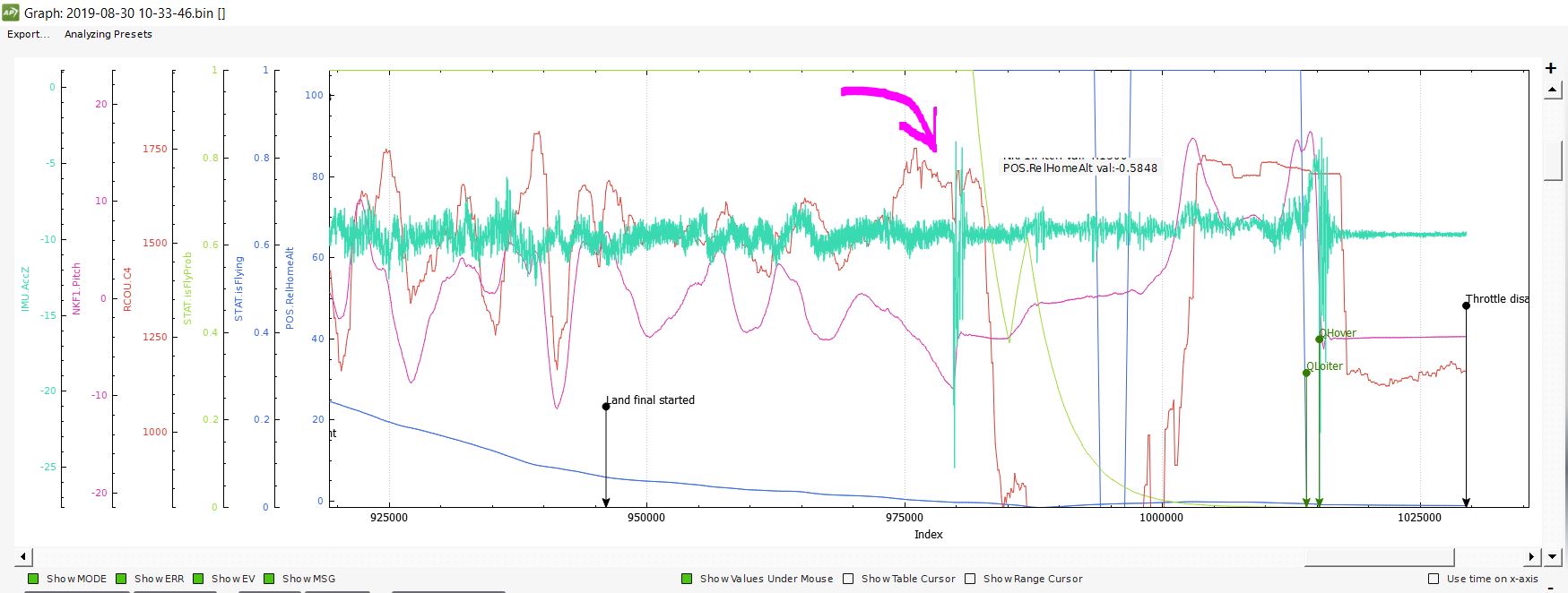
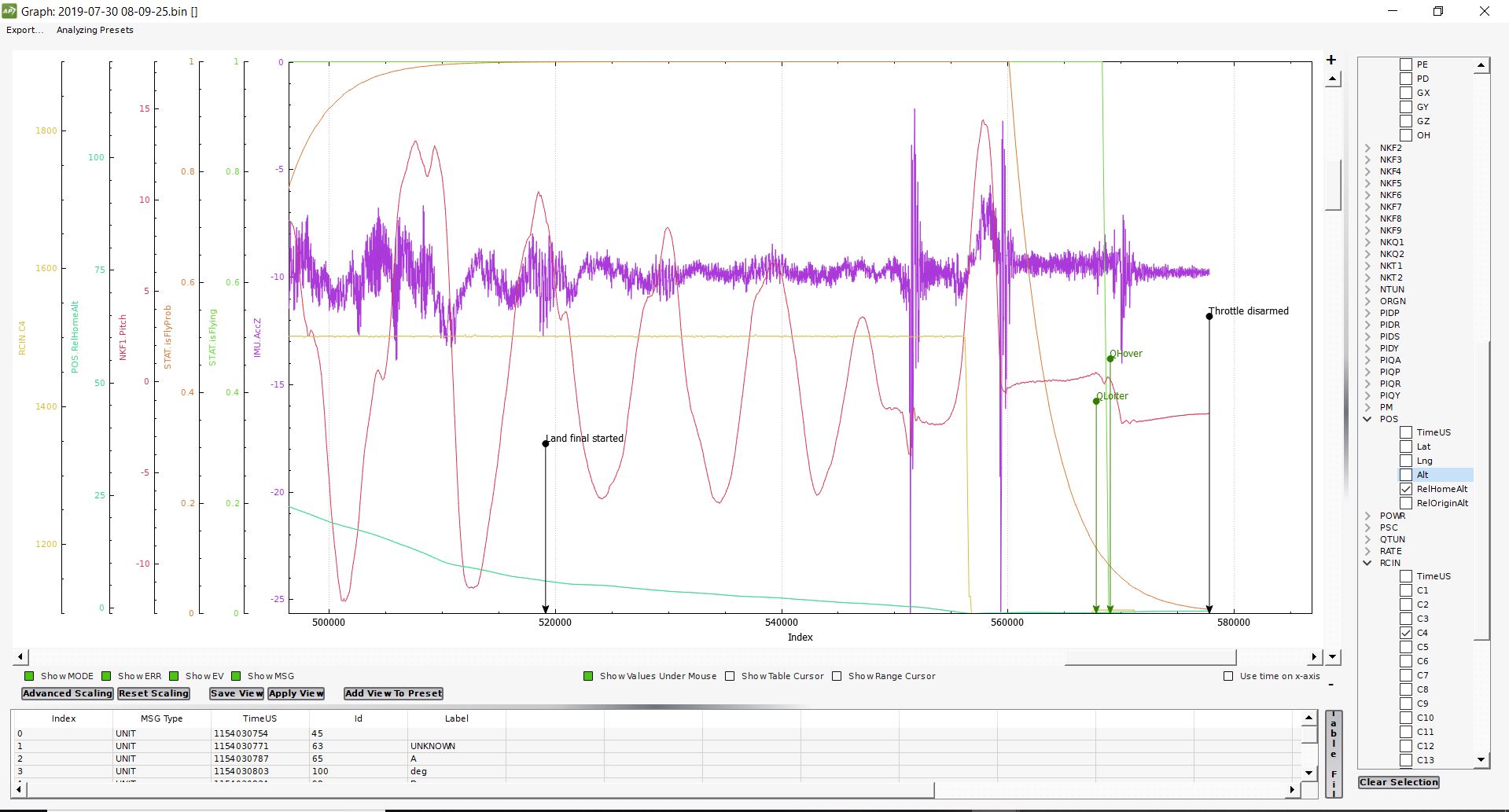
I took a look at the logs, I was looking at the STAT.isFlying and STAT.isFlyProb values along with IMU.AccZ, and could not understand if it’s having issues detecting a landing or not. I don’t know if this is a correct approach to look into.
Log Screenshots:
Additional thoughts:
I found this on the page for QLAND Mode documentation:
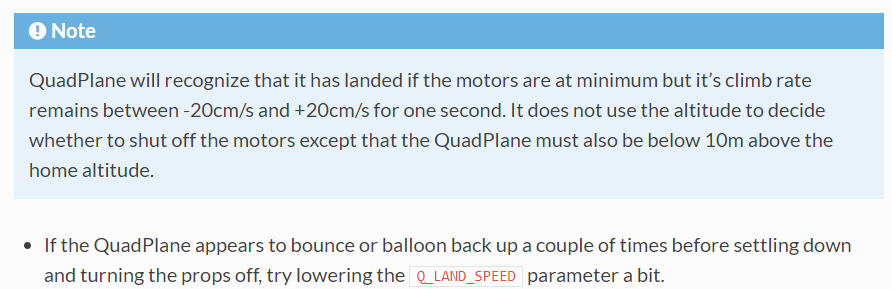
My QLAND parameters right now are:
Q_LAND_FINAL_ALT,6
Q_LAND_SPEED,50
Q_WP_SPEED_DN,250
I’ve done the landing transitions from fixed wing mode at 30 metres and 50 metres. As I understand it, the aircraft will descend from this transition altitude to 6 metres at 250 cm/s and then slow down to 50 cm/s. Is this correct? And if I were to follow the documentation, I would try to reduce Q_LAND_SPEED,50 to maybe 25 or 30?
Other possible causes that have come to mind:
Could wind be causing this at the point of touchdown?
Could the landing gear covering only a small area be causing this?
I would like to know if anyone has face similar issues with VTOLs and how do I diagnose what’s happening with my aircraft. Hope this isn’t too much info and appreciate any help. Thanks!
I’m attaching the logs and parameter file below:
Logs :
Couldn’t upload here, so put it up on Drive, let me know if there are permission issues
https://drive.google.com/drive/folders/1Ula9r_L3rz2zKE2aid0FOte4rOgHhqTq?usp=sharing
07AUG19-nimbus-params.param (16.9 KB)